正在加载图片...
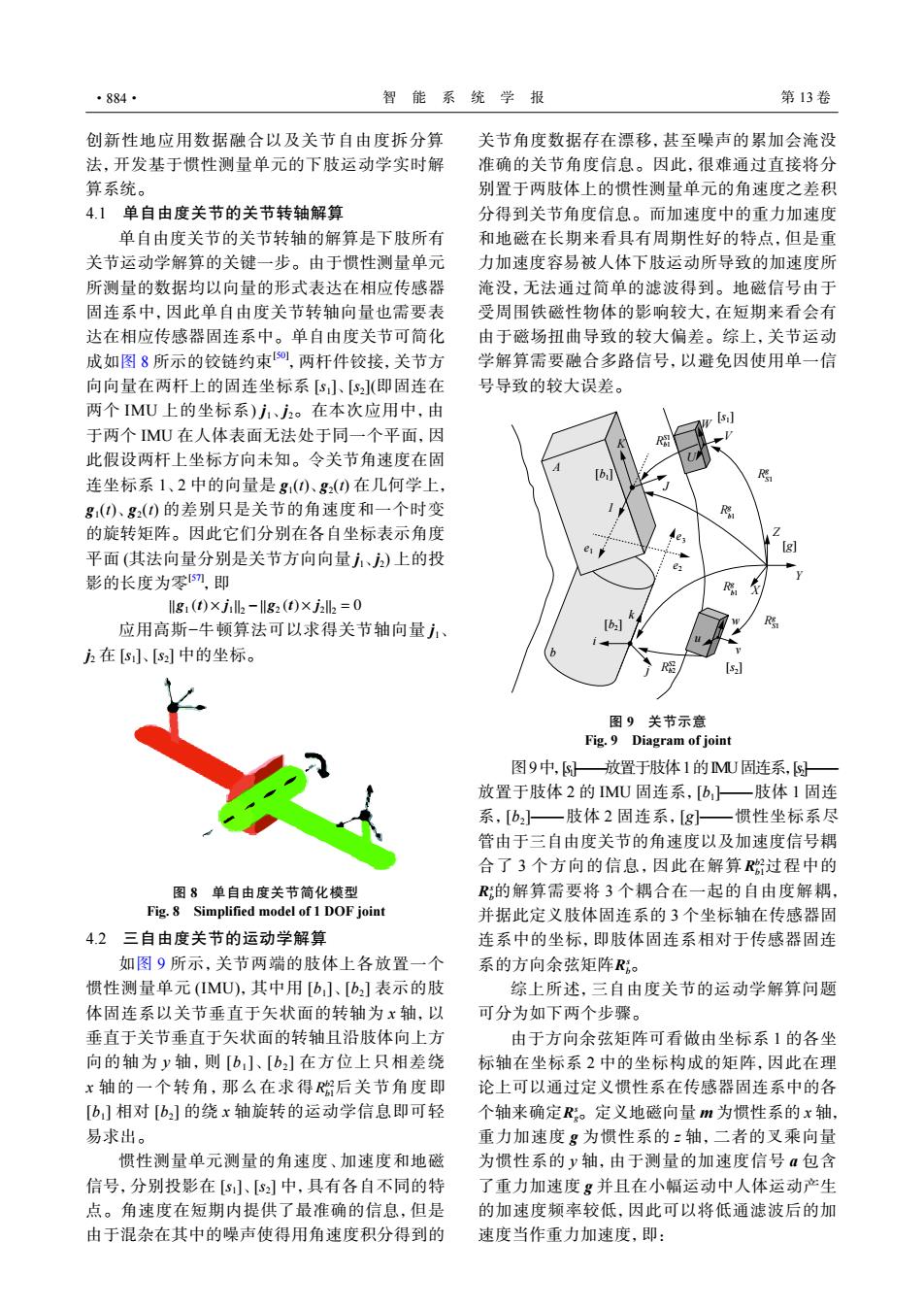
·884· 智能系统学报 第13卷 创新性地应用数据融合以及关节自由度拆分算 关节角度数据存在漂移,甚至噪声的累加会淹没 法,开发基于惯性测量单元的下肢运动学实时解 准确的关节角度信息。因此,很难通过直接将分 算系统。 别置于两肢体上的惯性测量单元的角速度之差积 4.1单自由度关节的关节转轴解算 分得到关节角度信息。而加速度中的重力加速度 单自由度关节的关节转轴的解算是下肢所有 和地磁在长期来看具有周期性好的特点,但是重 关节运动学解算的关键一步。由于惯性测量单元 力加速度容易被人体下肢运动所导致的加速度所 所测量的数据均以向量的形式表达在相应传感器 淹没,无法通过简单的滤波得到。地磁信号由于 固连系中,因此单自由度关节转轴向量也需要表 受周围铁磁性物体的影响较大,在短期来看会有 达在相应传感器固连系中。单自由度关节可简化 由于磁场扭曲导致的较大偏差。综上,关节运动 成如图8所示的铰链约束0,两杆件铰接,关节方 学解算需要融合多路信号,以避免因使用单一信 向向量在两杆上的固连坐标系[s]、[s2](即固连在 号导致的较大误差。 两个IMU上的坐标系)j1、j2。在本次应用中,由 于两个MU在人体表面无法处于同一个平面,因 此假设两杆上坐标方向未知。令关节角速度在固 连坐标系1、2中的向量是g1()、g2()在几何学上, g()、g()的差别只是关节的角速度和一个时变 的旋转矩阵。因此它们分别在各自坐标表示角度 平面(其法向量分别是关节方向向量j、)上的投 影的长度为零s7,即 lg1(t)×jik-lg2(t)×j2l2=0 应用高斯-牛顿算法可以求得关节轴向量j、 b 2在[s小、s]中的坐标。 [s.] 图9关节示意 Fig.9 Diagram of joint 图9中,—放置于肢体1的MU固连系, 放置于肢体2的MU固连系,[b一肢体1固连 系,[b}一肢体2固连系,[g}一惯性坐标系尽 管由于三自由度关节的角速度以及加速度信号耦 合了3个方向的信息,因此在解算过程中的 图8单自由度关节简化模型 R的解算需要将3个耦合在一起的自由度解耦, Fig.8 Simplified model of 1 DOF joint 并据此定义肢体固连系的3个坐标轴在传感器固 4.2三自由度关节的运动学解算 连系中的坐标,即肢体固连系相对于传感器固连 如图9所示,关节两端的肢体上各放置一个 系的方向余弦矩阵R。 惯性测量单元(MU),其中用[b]、[b]表示的肢 综上所述,三自由度关节的运动学解算问题 体固连系以关节垂直于矢状面的转轴为x轴,以 可分为如下两个步骤。 垂直于关节垂直于矢状面的转轴且沿肢体向上方 由于方向余弦矩阵可看做由坐标系1的各坐 向的轴为y轴,则[b]、[b2]在方位上只相差绕 标轴在坐标系2中的坐标构成的矩阵,因此在理 x轴的一个转角,那么在求得后关节角度即 论上可以通过定义惯性系在传感器固连系中的各 [b]相对[b]的绕x轴旋转的运动学信息即可轻 个轴来确定R。定义地磁向量m为惯性系的x轴, 易求出。 重力加速度g为惯性系的:轴,二者的叉乘向量 惯性测量单元测量的角速度、加速度和地磁 为惯性系的y轴,由于测量的加速度信号a包含 信号,分别投影在[s]、$2]中,具有各自不同的特 了重力加速度g并且在小幅运动中人体运动产生 点。角速度在短期内提供了最准确的信息,但是 的加速度频率较低,因此可以将低通滤波后的加 由于混杂在其中的噪声使得用角速度积分得到的 速度当作重力加速度,即:创新性地应用数据融合以及关节自由度拆分算 法,开发基于惯性测量单元的下肢运动学实时解 算系统。 4.1 单自由度关节的关节转轴解算 单自由度关节的关节转轴的解算是下肢所有 关节运动学解算的关键一步。由于惯性测量单元 所测量的数据均以向量的形式表达在相应传感器 固连系中,因此单自由度关节转轴向量也需要表 达在相应传感器固连系中。单自由度关节可简化 成如图 8 所示的铰链约束[50] ,两杆件铰接,关节方 向向量在两杆上的固连坐标系 [s1 ]、[s2 ](即固连在 两个 IMU 上的坐标系) j1、j2。在本次应用中,由 于两个 IMU 在人体表面无法处于同一个平面,因 此假设两杆上坐标方向未知。令关节角速度在固 连坐标系 1、2 中的向量是 g1 (t)、g2 (t) 在几何学上, g1 (t)、g2 (t) 的差别只是关节的角速度和一个时变 的旋转矩阵。因此它们分别在各自坐标表示角度 平面 (其法向量分别是关节方向向量 j1、j2 ) 上的投 影的长度为零[57] ,即 ∥g1 (t)× j1∥2 −∥g2 (t)× j2∥2 = 0 应用高斯−牛顿算法可以求得关节轴向量 j1、 j2 在 [s1 ]、[s2 ] 中的坐标。 图 8 单自由度关节简化模型 Fig. 8 Simplified model of 1 DOF joint 4.2 三自由度关节的运动学解算 R b2 b1 如图 9 所示,关节两端的肢体上各放置一个 惯性测量单元 (IMU),其中用 [b1 ]、[b2 ] 表示的肢 体固连系以关节垂直于矢状面的转轴为 x 轴,以 垂直于关节垂直于矢状面的转轴且沿肢体向上方 向的轴为 y 轴 ,则 [b1 ]、[b2 ] 在方位上只相差绕 x 轴的一个转角,那么在求得 后关节角度即 [b1 ] 相对 [b2 ] 的绕 x 轴旋转的运动学信息即可轻 易求出。 惯性测量单元测量的角速度、加速度和地磁 信号,分别投影在 [s1 ]、[s2 ] 中,具有各自不同的特 点。角速度在短期内提供了最准确的信息,但是 由于混杂在其中的噪声使得用角速度积分得到的 关节角度数据存在漂移,甚至噪声的累加会淹没 准确的关节角度信息。因此,很难通过直接将分 别置于两肢体上的惯性测量单元的角速度之差积 分得到关节角度信息。而加速度中的重力加速度 和地磁在长期来看具有周期性好的特点,但是重 力加速度容易被人体下肢运动所导致的加速度所 淹没,无法通过简单的滤波得到。地磁信号由于 受周围铁磁性物体的影响较大,在短期来看会有 由于磁场扭曲导致的较大偏差。综上,关节运动 学解算需要融合多路信号,以避免因使用单一信 号导致的较大误差。 R g S1 R g S1 R g b1 R g b1 Rb1 S1 Rb2 S2 j k i I J V K Z X Y w u v e1 e2 e3 A b U W [s1 ] [b1 ] [s2 ] [b2 ] [g] 图 9 关节示意 Fig. 9 Diagram of joint R b2 b1 R s b R s b 图9中,[s1 ]—放置于肢体1的IMU固连系,[s2 ]— 放置于肢体 2 的 IMU 固连系,[b1 ]—肢体 1 固连 系,[b2 ]—肢体 2 固连系,[g]—惯性坐标系尽 管由于三自由度关节的角速度以及加速度信号耦 合了 3 个方向的信息,因此在解算 过程中的 的解算需要将 3 个耦合在一起的自由度解耦, 并据此定义肢体固连系的 3 个坐标轴在传感器固 连系中的坐标,即肢体固连系相对于传感器固连 系的方向余弦矩阵 。 综上所述,三自由度关节的运动学解算问题 可分为如下两个步骤。 R s g 由于方向余弦矩阵可看做由坐标系 1 的各坐 标轴在坐标系 2 中的坐标构成的矩阵,因此在理 论上可以通过定义惯性系在传感器固连系中的各 个轴来确定 。定义地磁向量 m 为惯性系的 x 轴, 重力加速度 g 为惯性系的 z 轴,二者的叉乘向量 为惯性系的 y 轴,由于测量的加速度信号 a 包含 了重力加速度 g 并且在小幅运动中人体运动产生 的加速度频率较低,因此可以将低通滤波后的加 速度当作重力加速度,即: ·884· 智 能 系 统 学 报 第 13 卷