正在加载图片...
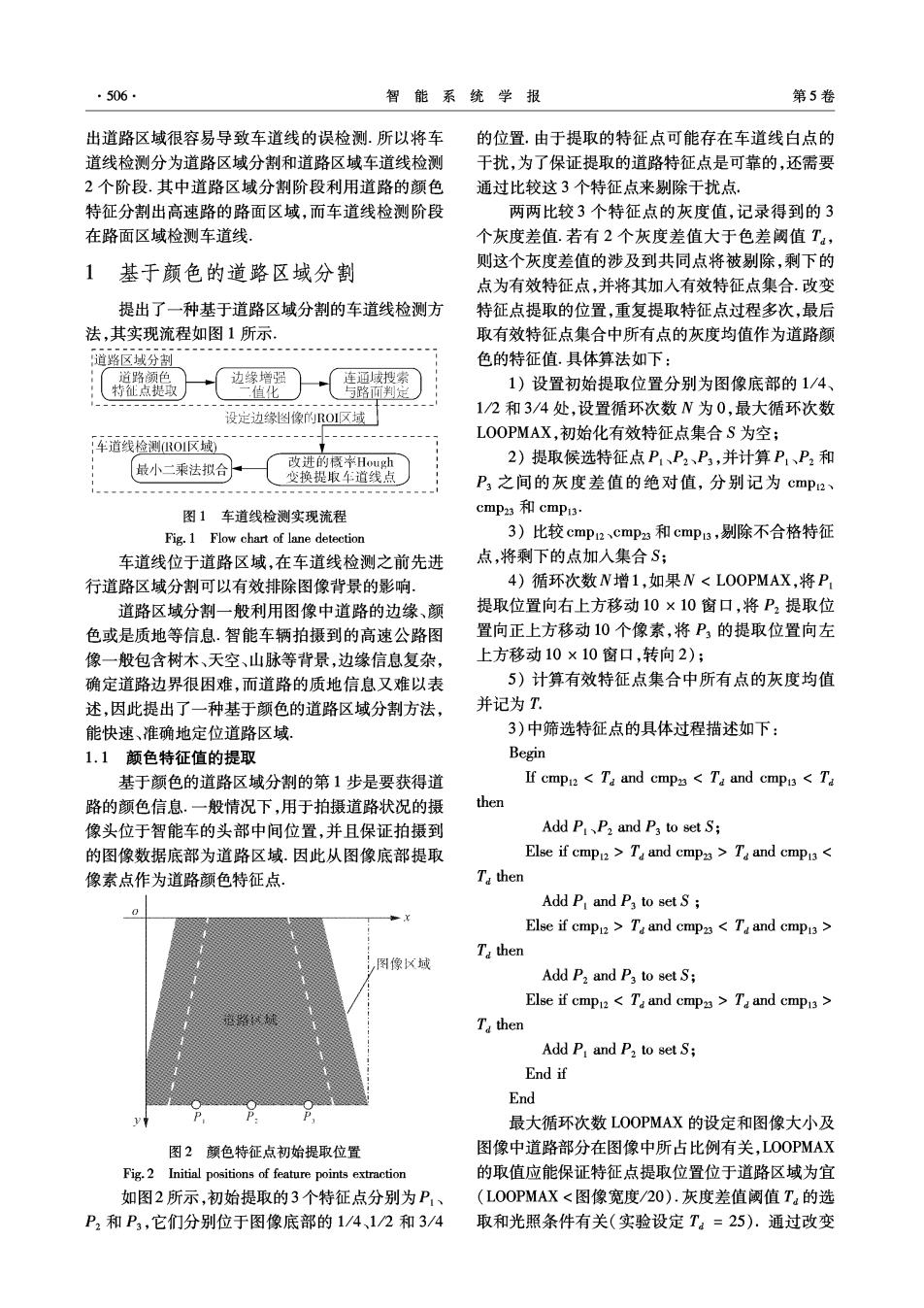
·506 智能系统学报 第5卷 出道路区域很容易导致车道线的误检测.所以将车 的位置.由于提取的特征点可能存在车道线白点的 道线检测分为道路区域分割和道路区域车道线检测 干扰,为了保证提取的道路特征点是可靠的,还需要 2个阶段.其中道路区域分割阶段利用道路的颜色 通过比较这3个特征点来剔除干扰点。 特征分割出高速路的路面区域,而车道线检测阶段 两两比较3个特征点的灰度值,记录得到的3 在路面区域检测车道线。 个灰度差值.若有2个灰度差值大于色差阚值T, 则这个灰度差值的涉及到共同点将被剔除,剩下的 1基于颜色的道路区域分割 点为有效特征点,并将其加入有效特征点集合.改变 提出了一种基于道路区域分割的车道线检测方 特征点提取的位置,重复提取特征点过程多次,最后 法,其实现流程如图1所示 取有效特征点集合中所有点的灰度均值作为道路颜 道路区域分制 色的特征值.具体算法如下: 道路颜色 边缘增强 连通域搜索 特征点提取 二值化 1)设置初始提取位置分别为图像底部的1/4、 与路而判定 设定边缘图像的ROI区域 1/2和3/4处,设置循环次数N为0,最大循环次数 LOOPMAX,初始化有效特征点集合S为空; :车道线检测ROI区域) 最小二乘法拟合 改进的概*Hough 2)提取候选特征点P、P2、P3,并计算P、P2和 变换提取车道线点 P3之间的灰度差值的绝对值,分别记为cmP2、 图1车道线检测实现流程 cmP23和Cmp13, Fig.1 Flow chart of lane detection 3)比较cmp2、cmp3和cmpa,别除不合格特征 车道线位于道路区域,在车道线检测之前先进 点,将剩下的点加入集合S; 行道路区域分割可以有效排除图像背景的影响。 4)循环次数W增1,如果W<L00PMAX,将P 道路区域分割一般利用图像中道路的边缘、颜 提取位置向右上方移动10×10窗口,将P2提取位 色或是质地等信息.智能车辆拍摄到的高速公路图 置向正上方移动10个像素,将P3的提取位置向左 像一般包含树木、天空、山脉等背景,边缘信息复杂, 上方移动10×10窗口,转向2); 确定道路边界很困难,而道路的质地信息又难以表 5)计算有效特征点集合中所有点的灰度均值 述,因此提出了一种基于颜色的道路区域分割方法, 并记为T 能快速、准确地定位道路区域, 3)中筛选特征点的具体过程描述如下: 1.1颜色特征值的提取 Begin 基于颜色的道路区域分割的第1步是要获得道 If cmpn2 Ta and cmpa<Ta and cmpi3 Ta 路的颜色信息.一般情况下,用于拍摄道路状况的摄 then 像头位于智能车的头部中间位置,并且保证拍摄到 Add PP2 and P3 to set S; 的图像数据底部为道路区域.因此从图像底部提取 Else if cmp2 Ta and cmp2s Ta and cmpi3 像素点作为道路颜色特征点 Ta then Add P and P3 to set S; Else if cmp2>Ta and cmp23 Ta and cmpi3 Ta then ,图像区域 Add P2 and P3 to set S; Else if cmp2<Ta and cmp2 Ta and cmpi3> T then Add P and P2 to set S; End if End 最大循环次数LOOPMAX的设定和图像大小及 图2颜色特征点初始提取位置 图像中道路部分在图像中所占比例有关,LOOPMAX Fig.2 Initial positions of feature points extraction 的取值应能保证特征点提取位置位于道路区域为宜 如图2所示,初始提取的3个特征点分别为P,、 (LOOPMAX<图像宽度/20).灰度差值阈值T,的选 P2和P3,它们分别位于图像底部的1/4、1/2和3/4 取和光照条件有关(实验设定T:=25).通过改变