正在加载图片...
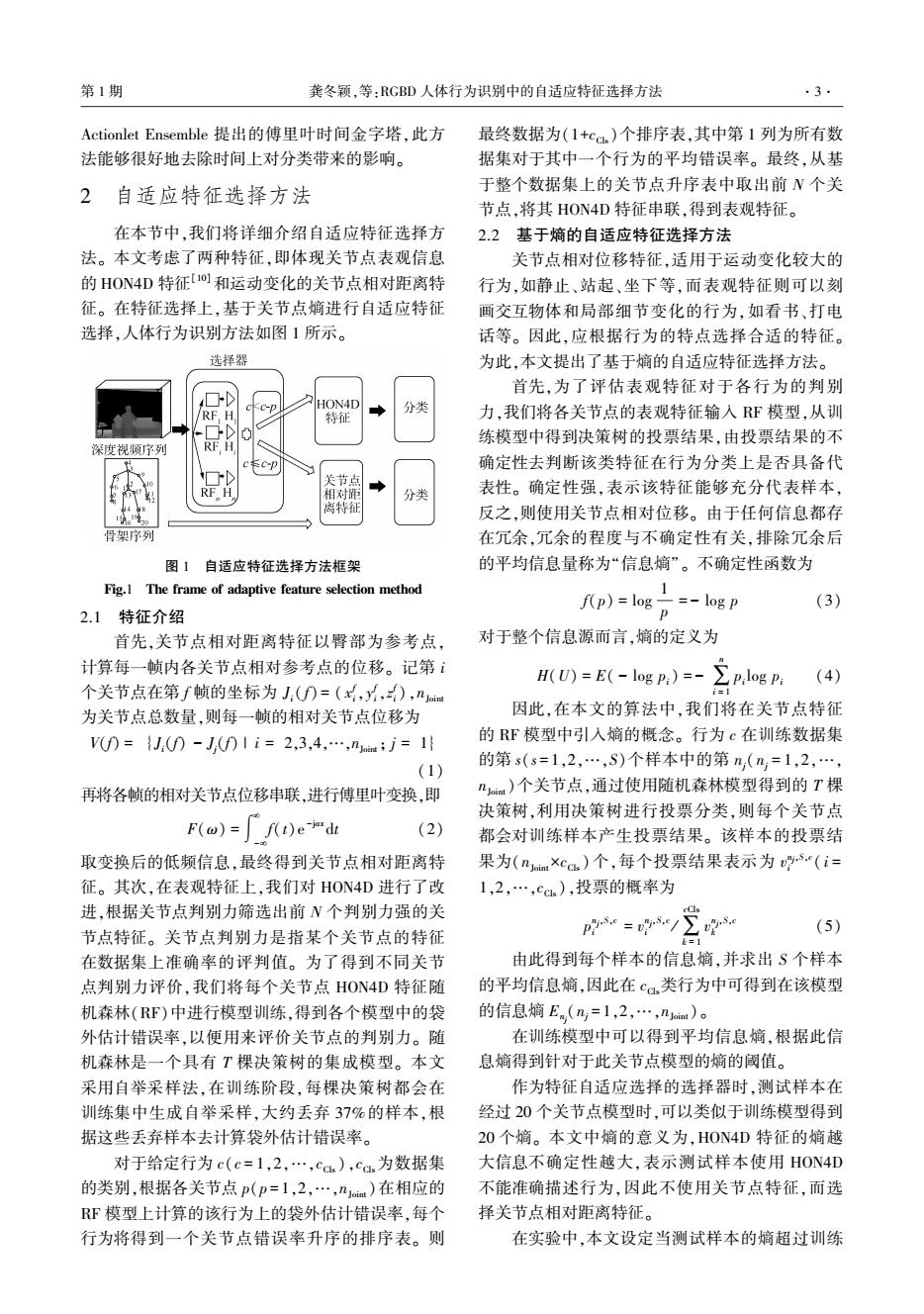
第1期 龚冬颖,等:RGBD人体行为识别中的自适应特征选择方法 3· Actionlet Ensemble提出的傅里叶时间金字塔,此方 最终数据为(1+cc)个排序表,其中第1列为所有数 法能够很好地去除时间上对分类带来的影响。 据集对于其中一个行为的平均错误率。最终,从基 自适应特征选择方法 于整个数据集上的关节点升序表中取出前N个关 2 节点,将其HON4D特征串联,得到表观特征。 在本节中,我们将详细介绍自适应特征选择方 2.2基于熵的自适应特征选择方法 法。本文考虑了两种特征,即体现关节点表观信息 关节点相对位移特征,适用于运动变化较大的 的HON4D特征[1o和运动变化的关节点相对距离特 行为,如静止、站起、坐下等,而表观特征则可以刻 征。在特征选择上,基于关节点嫡进行自适应特征 画交互物体和局部细节变化的行为,如看书、打电 选择,人体行为识别方法如图1所示。 话等。因此,应根据行为的特点选择合适的特征。 选择器 为此,本文提出了基于嫡的自适应特征选择方法。 首先,为了评估表观特征对于各行为的判别 HON4D RE ◆ 分类 特征 力,我们将各关节点的表观特征输入RF模型,从训 练模型中得到决策树的投票结果,由投票结果的不 深度视频序列 确定性去判断该类特征在行为分类上是否具备代 关节点 F H 相对距 分类 表性。确定性强,表示该特征能够充分代表样本, 离特征 反之,则使用关节点相对位移。由于任何信息都存 骨架序列 在冗余,冗余的程度与不确定性有关,排除冗余后 图1自适应特征选择方法框架 的平均信息量称为“信息嫡”。不确定性函数为 Fig.1 The frame of adaptive feature selection method 1 fp)=log÷=-logp (3) 2.1特征介绍 p 首先,关节点相对距离特征以臀部为参考点, 对于整个信息源而言,嫡的定义为 计算每一帧内各关节点相对参考点的位移。记第i H(U)=E(-logP:)=-】 立pog P时 (4) 个关节点在第f帧的坐标为J,(=(,,),nmm =1 为关节点总数量,则每一帧的相对关节点位移为 因此,在本文的算法中,我们将在关节点特征 V(f)={J.(f-Jf)1i=2,3,4,…,nm;j=1} 的RF模型中引入熵的概念。行为c在训练数据集 (1) 的第s(s=1,2,…,S)个样本中的第n(n=1,2,…, 再将各帧的相对关节点位移串联,进行傅里叶变换,即 n)个关节点,通过使用随机森林模型得到的T棵 决策树,利用决策树进行投票分类,则每个关节点 F(u)=∫厂foe"a (2) 都会对训练样本产生投票结果。该样本的投票结 取变换后的低频信息,最终得到关节点相对距离特 果为(noa×cc)个,每个投票结果表示为?s,(i= 征。其次,在表观特征上,我们对HON4D进行了改 1,2,…,cc4s),投票的概率为 进,根据关节点判别力筛选出前N个判别力强的关 空se=gs/∑g成e (5) 节点特征。关节点判别力是指某个关节点的特征 在数据集上准确率的评判值。为了得到不同关节 由此得到每个样本的信息嫡,并求出个样本 点判别力评价,我们将每个关节点HON4D特征随 的平均信息嫡,因此在c。.类行为中可得到在该模型 机森林(RF)中进行模型训练,得到各个模型中的袋 的信息嫡En(n,=1,2,…,nJoint)。 外估计错误率,以便用来评价关节点的判别力。随 在训练模型中可以得到平均信息嫡,根据此信 机森林是一个具有T棵决策树的集成模型。本文 息嫡得到针对于此关节点模型的嫡的阈值。 采用自举采样法,在训练阶段,每棵决策树都会在 作为特征自适应选择的选择器时,测试样本在 训练集中生成自举采样,大约丢弃37%的样本,根 经过20个关节点模型时,可以类似于训练模型得到 据这些丢弃样本去计算袋外估计错误率。 20个嫡。本文中熵的意义为,HON4D特征的嫡越 对于给定行为c(c=1,2,…,cc),cu.为数据集 大信息不确定性越大,表示测试样本使用HON4D 的类别,根据各关节点p(p=1,2,…,ni)在相应的 不能准确描述行为,因此不使用关节点特征,而选 RF模型上计算的该行为上的袋外估计错误率,每个 择关节点相对距离特征。 行为将得到一个关节点错误率升序的排序表。则 在实验中,本文设定当测试样本的嫡超过训练Actionlet Ensemble 提出的傅里叶时间金字塔,此方 法能够很好地去除时间上对分类带来的影响。 2 自适应特征选择方法 在本节中,我们将详细介绍自适应特征选择方 法。 本文考虑了两种特征,即体现关节点表观信息 的 HON4D 特征[10]和运动变化的关节点相对距离特 征。 在特征选择上,基于关节点熵进行自适应特征 选择,人体行为识别方法如图 1 所示。 图 1 自适应特征选择方法框架 Fig.1 The frame of adaptive feature selection method 2.1 特征介绍 首先,关节点相对距离特征以臀部为参考点, 计算每一帧内各关节点相对参考点的位移。 记第 i 个关节点在第 f 帧的坐标为 Ji( f) = ( x f i,y f i,z f i),nJoint 为关节点总数量,则每一帧的相对关节点位移为 V(f) = {Ji(f) - Jj(f) | i = 2,3,4,…,nJoint; j = 1} (1) 再将各帧的相对关节点位移串联,进行傅里叶变换,即 F(ω) = ∫ ¥ -¥ f(t)e -jax dt (2) 取变换后的低频信息,最终得到关节点相对距离特 征。 其次,在表观特征上,我们对 HON4D 进行了改 进,根据关节点判别力筛选出前 N 个判别力强的关 节点特征。 关节点判别力是指某个关节点的特征 在数据集上准确率的评判值。 为了得到不同关节 点判别力评价,我们将每个关节点 HON4D 特征随 机森林(RF)中进行模型训练,得到各个模型中的袋 外估计错误率,以便用来评价关节点的判别力。 随 机森林是一个具有 T 棵决策树的集成模型。 本文 采用自举采样法,在训练阶段,每棵决策树都会在 训练集中生成自举采样,大约丢弃 37%的样本,根 据这些丢弃样本去计算袋外估计错误率。 对于给定行为 c(c = 1,2,…,cCls),cCls为数据集 的类别,根据各关节点 p(p = 1,2,…,nJoint)在相应的 RF 模型上计算的该行为上的袋外估计错误率,每个 行为将得到一个关节点错误率升序的排序表。 则 最终数据为(1+cCls)个排序表,其中第 1 列为所有数 据集对于其中一个行为的平均错误率。 最终,从基 于整个数据集上的关节点升序表中取出前 N 个关 节点,将其 HON4D 特征串联,得到表观特征。 2.2 基于熵的自适应特征选择方法 关节点相对位移特征,适用于运动变化较大的 行为,如静止、站起、坐下等,而表观特征则可以刻 画交互物体和局部细节变化的行为,如看书、打电 话等。 因此,应根据行为的特点选择合适的特征。 为此,本文提出了基于熵的自适应特征选择方法。 首先,为了评估表观特征对于各行为的判别 力,我们将各关节点的表观特征输入 RF 模型,从训 练模型中得到决策树的投票结果,由投票结果的不 确定性去判断该类特征在行为分类上是否具备代 表性。 确定性强,表示该特征能够充分代表样本, 反之,则使用关节点相对位移。 由于任何信息都存 在冗余,冗余的程度与不确定性有关,排除冗余后 的平均信息量称为“信息熵”。 不确定性函数为 f(p) = log 1 p = - log p (3) 对于整个信息源而言,熵的定义为 H(U) = E( - log pi) = - ∑ n i = 1 pi log pi (4) 因此,在本文的算法中,我们将在关节点特征 的 RF 模型中引入熵的概念。 行为 c 在训练数据集 的第 s(s = 1,2,…,S)个样本中的第 nj(nj = 1,2,…, nJoint)个关节点,通过使用随机森林模型得到的 T 棵 决策树,利用决策树进行投票分类,则每个关节点 都会对训练样本产生投票结果。 该样本的投票结 果为(nJoint ×cCls ) 个,每个投票结果表示为 v nj ,S,c i ( i = 1,2,…,cCls),投票的概率为 p nj ,S,c i = v nj ,S,c i /∑ cCls k = 1 v nj ,S,c k (5) 由此得到每个样本的信息熵,并求出 S 个样本 的平均信息熵,因此在 cCls类行为中可得到在该模型 的信息熵 Enj (nj = 1,2,…,nJoint)。 在训练模型中可以得到平均信息熵,根据此信 息熵得到针对于此关节点模型的熵的阈值。 作为特征自适应选择的选择器时,测试样本在 经过 20 个关节点模型时,可以类似于训练模型得到 20 个熵。 本文中熵的意义为,HON4D 特征的熵越 大信息不确定性越大,表示测试样本使用 HON4D 不能准确描述行为,因此不使用关节点特征,而选 择关节点相对距离特征。 在实验中,本文设定当测试样本的熵超过训练 第 1 期 龚冬颖,等:RGBD 人体行为识别中的自适应特征选择方法 ·3·