正在加载图片...
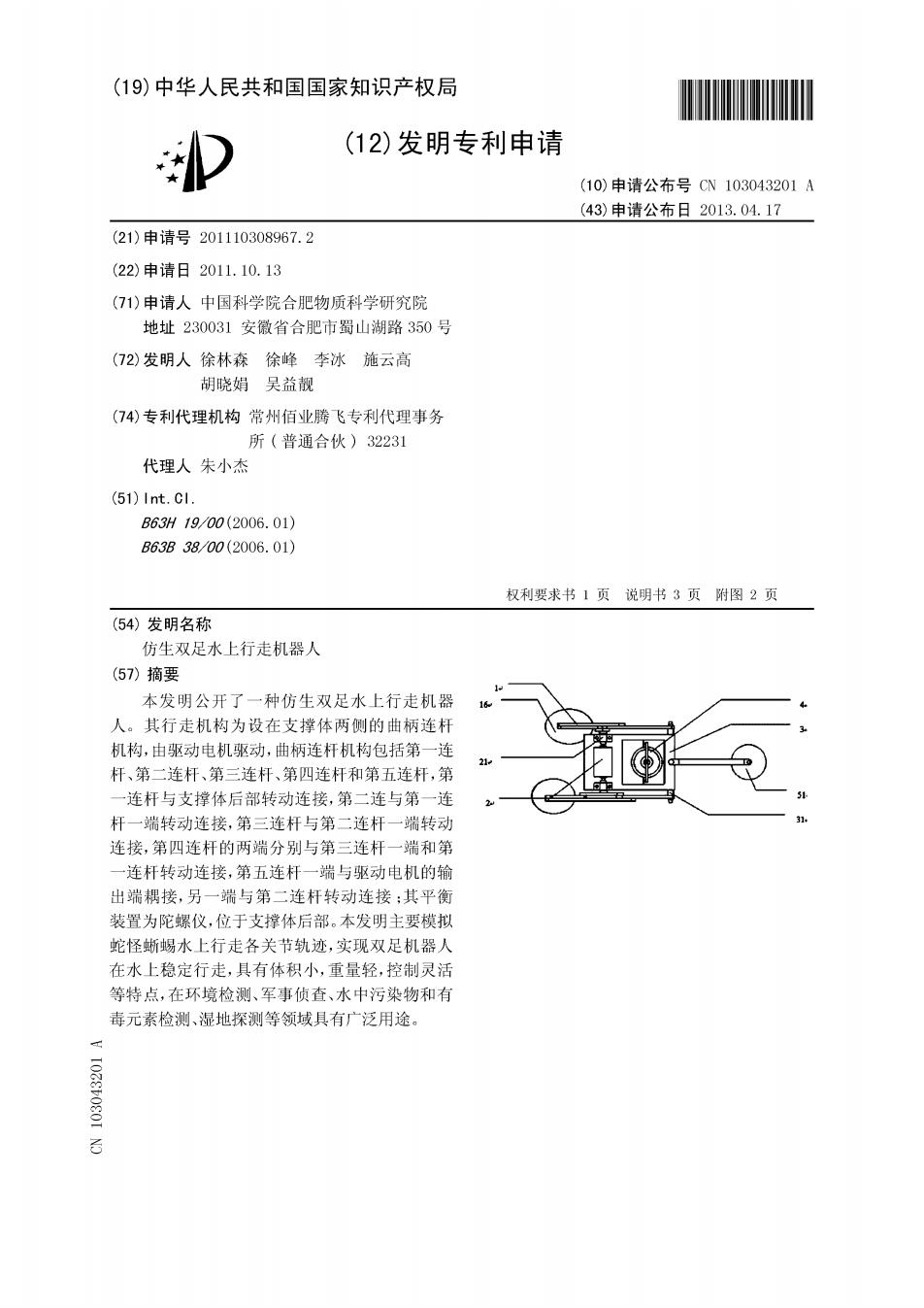
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN103043201A (43)申请公布日2013.04.17 (21)申请号201110308967.2 (22)申请日2011.10.13 (71)申请人中国科学院合肥物质科学研究院 地址230031安徽省合肥市蜀山湖路350号 (72)发明人徐林森徐峰李冰施云高 胡晓娟吴益靓 (74)专利代理机构常州佰业腾飞专利代理事务 所(普通合伙)32231 代理人朱小杰 (51)1nt.cl. B63H1900(2006.01) B63B3800(2006.01) 权利要求书1页说明书3页附图2页 (54)发明名称 仿生双足水上行走机器人 (57)摘要 本发明公开了一种仿生双足水上行走机器 人。其行走机构为设在支撑体两侧的曲柄连杆 机构,由驱动电机驱动,曲柄连杆机构包括第一连 21 杆、第二连杆、第三连杆、第四连杆和第五连杆,第 一连杆与支撑体后部转动连接,第二连与第一连 31 2 杆一端转动连接,第三连杆与第二连杆一端转动 31 连接,第四连杆的两端分别与第三连杆一端和第 一连杆转动连接,第五连杆一端与驱动电机的输 出端耦接,另一端与第二连杆转动连接:其平衡 装置为陀螺仪,位于支撑体后部。本发明主要模拟 蛇怪蜥蜴水上行走各关节轨迹,实现双足机器人 在水上稳定行走,具有体积小,重量轻,控制灵活 等特点,在环境检测、军事侦查、水中污染物和有 毒元素检测、湿地探测等领域具有广泛用途。 10650901