正在加载图片...
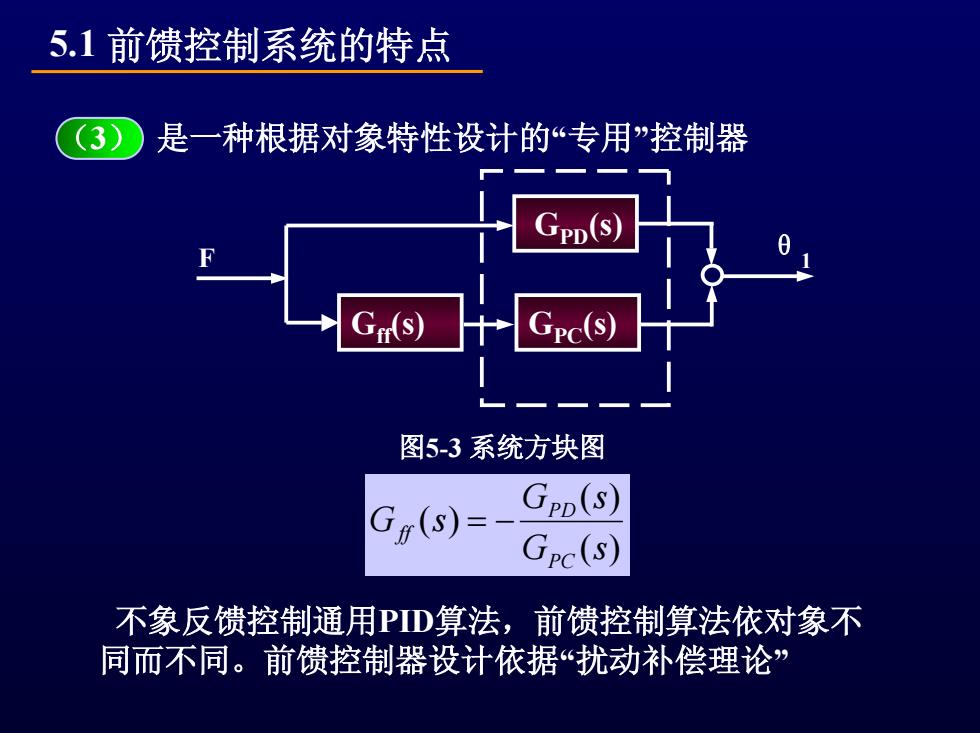
5.1前馈控制系统的特点 是一种根据对象特性设计的“专用”控制器 GPD(s) Gr(s) Gpc(s) 图53系统方块图 G(s)= Gpp(S) Gpc(s) 不象反馈控制通用PD算法,前馈控制算法依对象不 同而不同。前馈控制器设计依据“扰动补偿理论”5.1 前馈控制系统的特点 (3) 是一种根据对象特性设计的“专用”控制器 GPD(s) GPC G (s) ff(s) F θ1 图5-3 系统方块图 ( ) ( ) ( ) G s G s G s PCPD ff = − 不象反馈控制通用PID算法,前馈控制算法依对象不 同而不同。前馈控制器设计依据“扰动补偿理论