正在加载图片...
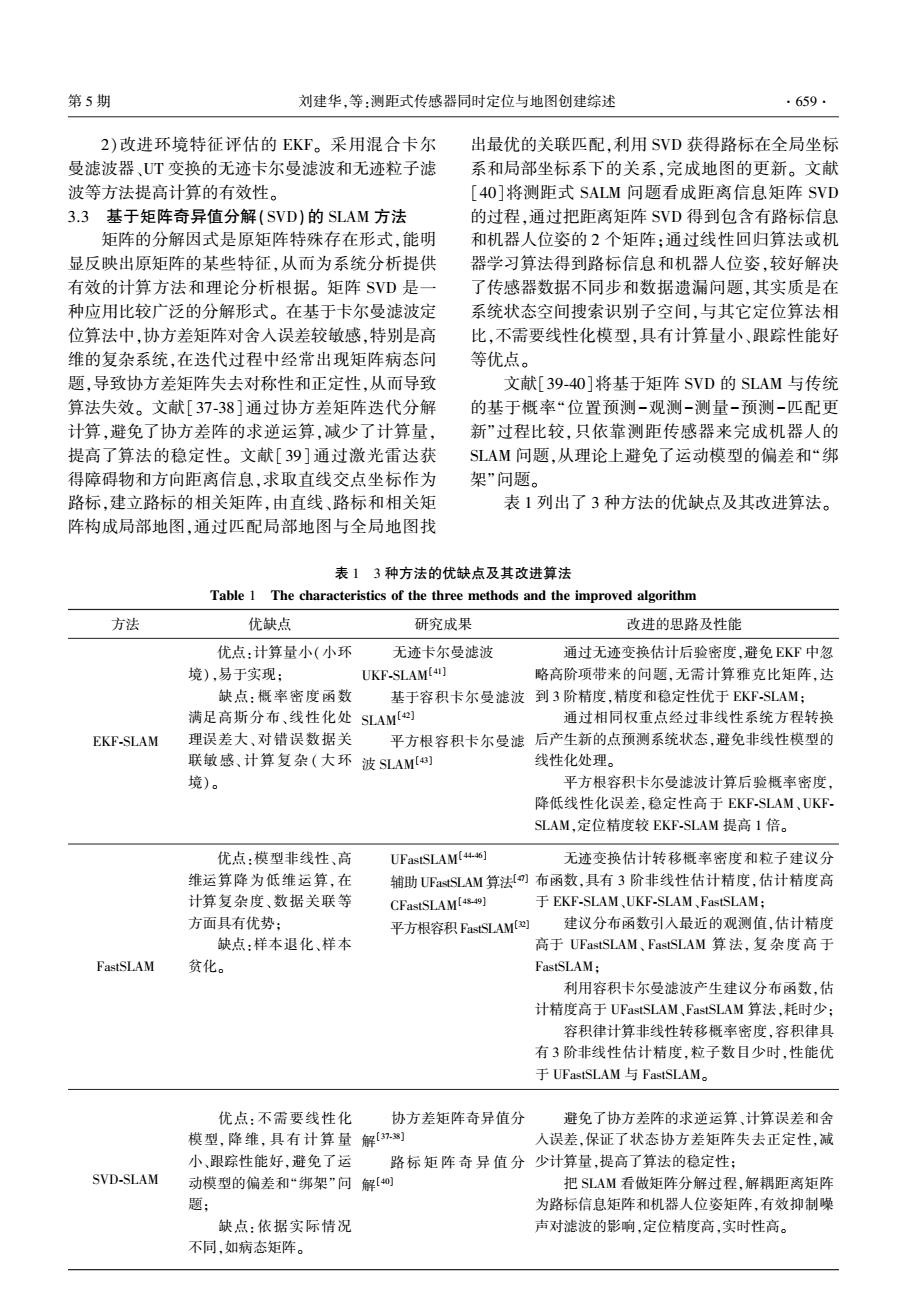
第5期 刘建华,等:测距式传感器同时定位与地图创建综述 ·659. 2)改进环境特征评估的EKF。采用混合卡尔 出最优的关联匹配,利用SVD获得路标在全局坐标 曼滤波器、UT变换的无迹卡尔曼滤波和无迹粒子滤 系和局部坐标系下的关系,完成地图的更新。文献 波等方法提高计算的有效性。 [40]将测距式SALM问题看成距离信息矩阵SVD 3.3基于矩阵奇异值分解(SVD)的SLAM方法 的过程,通过把距离矩阵SVD得到包含有路标信息 矩阵的分解因式是原矩阵特殊存在形式,能明 和机器人位姿的2个矩阵:通过线性回归算法或机 显反映出原矩阵的某些特征,从而为系统分析提供 器学习算法得到路标信息和机器人位姿,较好解决 有效的计算方法和理论分析根据。矩阵SVD是一 了传感器数据不同步和数据遗漏问题,其实质是在 种应用比较广泛的分解形式。在基于卡尔曼滤波定 系统状态空间搜索识别子空间,与其它定位算法相 位算法中,协方差矩阵对舍入误差较敏感,特别是高 比,不需要线性化模型,具有计算量小、跟踪性能好 维的复杂系统,在迭代过程中经常出现矩阵病态问 等优点。 题,导致协方差矩阵失去对称性和正定性,从而导致 文献[39-40]将基于矩阵SVD的SLAM与传统 算法失效。文献[37-38]通过协方差矩阵迭代分解 的基于概率“位置预测-观测-测量-预测-匹配更 计算,避免了协方差阵的求逆运算,减少了计算量, 新”过程比较,只依靠测距传感器来完成机器人的 提高了算法的稳定性。文献[39]通过激光雷达获 LAM问题,从理论上避免了运动模型的偏差和“绑 得障碍物和方向距离信息,求取直线交点坐标作为 架”问题。 路标,建立路标的相关矩阵,由直线、路标和相关矩 表1列出了3种方法的优缺点及其改进算法。 阵构成局部地图,通过匹配局部地图与全局地图找 表13种方法的优缺点及其改进算法 Table 1 The characteristics of the three methods and the improved algorithm 方法 优缺点 研究成果 改进的思路及性能 优点:计算量小(小环 无迹卡尔曼滤波 通过无迹变换估计后验密度,避免EKF中忽 境),易于实现: UKF-SLAMC4] 略高阶项带来的问题,无需计算雅克比矩阵,达 缺点:概率密度函数 基于容积卡尔曼滤波到3阶精度,精度和稳定性优于EKF-SLAM; 满足高斯分布、线性化处SLAM2] 通过相同权重点经过非线性系统方程转换 EKF-SLAM 理误差大、对错误数据关 平方根容积卡尔曼滤后产生新的点预测系统状态,避免非线性模型的 联敏感、计算复杂(大环波SLAM) 线性化处理。 境)。 平方根容积卡尔曼滤波计算后验概率密度」 降低线性化误差,稳定性高于EKF-SLAM,UKF- SLAM,定位精度较EKF-SLAM提高1倍。 优点:模型非线性、高 UFastSLAM(44-4] 无迹变换估计转移概率密度和粒子建议分 维运算降为低维运算,在 辅助UFastSLAM算法可布函数,具有3阶非线性估计精度,估计精度高 计算复杂度、数据关联等 CFastSLAM[4-9] 于EKF-SLAM、UKF-SLAM、FastSLAM: 方面具有优势: 平方根容积FastSLAM倒 建议分布函数引入最近的观测值,估计精度 缺点:样本退化、样本 高于UFastSLAM、FastSLAM算法,复杂度高于 FastSLAM 贫化。 FastSLAM: 利用容积卡尔曼滤波产生建议分布函数,估 计精度高于UFastSLAM、FastSLAM算法,耗时少: 容积律计算非线性转移概率密度,容积律具 有3阶非线性估计精度,粒子数目少时,性能优 于UFastSLAM与FastSLAM.。 优点:不需要线性化 协方差矩阵奇异值分 避免了协方差阵的求逆运算、计算误差和舍 模型,降维,具有计算量解3】 入误差,保证了状态协方差矩阵失去正定性,减 小、跟踪性能好,避免了运 路标矩阵奇异值分少计算量,提高了算法的稳定性: SVD-SLAM 动模型的偏差和“绑架”问解[o 把SLAM看做矩阵分解过程,解耦距离矩阵 题; 为路标信息矩阵和机器人位姿矩阵,有效抑制噪 缺点:依据实际情况 声对滤波的影响,定位精度高,实时性高。 不同,如病态矩阵。2)改进环境特征评估的 EKF。 采用混合卡尔 曼滤波器、UT 变换的无迹卡尔曼滤波和无迹粒子滤 波等方法提高计算的有效性。 3.3 基于矩阵奇异值分解(SVD)的 SLAM 方法 矩阵的分解因式是原矩阵特殊存在形式,能明 显反映出原矩阵的某些特征,从而为系统分析提供 有效的计算方法和理论分析根据。 矩阵 SVD 是一 种应用比较广泛的分解形式。 在基于卡尔曼滤波定 位算法中,协方差矩阵对舍入误差较敏感,特别是高 维的复杂系统,在迭代过程中经常出现矩阵病态问 题,导致协方差矩阵失去对称性和正定性,从而导致 算法失效。 文献[37⁃38]通过协方差矩阵迭代分解 计算,避免了协方差阵的求逆运算,减少了计算量, 提高了算法的稳定性。 文献[39] 通过激光雷达获 得障碍物和方向距离信息,求取直线交点坐标作为 路标,建立路标的相关矩阵,由直线、路标和相关矩 阵构成局部地图,通过匹配局部地图与全局地图找 出最优的关联匹配,利用 SVD 获得路标在全局坐标 系和局部坐标系下的关系,完成地图的更新。 文献 [40]将测距式 SALM 问题看成距离信息矩阵 SVD 的过程,通过把距离矩阵 SVD 得到包含有路标信息 和机器人位姿的 2 个矩阵;通过线性回归算法或机 器学习算法得到路标信息和机器人位姿,较好解决 了传感器数据不同步和数据遗漏问题,其实质是在 系统状态空间搜索识别子空间,与其它定位算法相 比,不需要线性化模型,具有计算量小、跟踪性能好 等优点。 文献[39⁃40]将基于矩阵 SVD 的 SLAM 与传统 的基于概率“位置预测-观测-测量-预测-匹配更 新”过程比较,只依靠测距传感器来完成机器人的 SLAM 问题,从理论上避免了运动模型的偏差和“绑 架”问题。 表 1 列出了 3 种方法的优缺点及其改进算法。 表 1 3 种方法的优缺点及其改进算法 Table 1 The characteristics of the three methods and the improved algorithm 方法 优缺点 研究成果 改进的思路及性能 EKF⁃SLAM 优点:计算量小(小环 境),易于实现; 缺点:概率密度函数 满足高斯分布、线性化处 理误差大、对错误数据关 联敏 感、 计 算 复 杂 ( 大 环 境)。 无迹卡尔曼滤波 UKF⁃SLAM [41] 基于容积卡尔曼滤波 SLAM [42] 平方根容积卡尔曼滤 波 SLAM [43] 通过无迹变换估计后验密度,避免 EKF 中忽 略高阶项带来的问题,无需计算雅克比矩阵,达 到 3 阶精度,精度和稳定性优于 EKF⁃SLAM; 通过相同权重点经过非线性系统方程转换 后产生新的点预测系统状态,避免非线性模型的 线性化处理。 平方根容积卡尔曼滤波计算后验概率密度, 降低线性化误差,稳定性高于 EKF⁃SLAM、UKF⁃ SLAM,定位精度较 EKF⁃SLAM 提高 1 倍。 FastSLAM 优点:模型非线性、高 维运算降为低维运算,在 计算复杂度、数据关联等 方面具有优势; 缺点:样本退化、样本 贫化。 UFastSLAM [44⁃46] 辅助 UFastSLAM 算法[47] CFastSLAM [48⁃49] 平方根容积 FastSLAM [32] 无迹变换估计转移概率密度和粒子建议分 布函数,具有 3 阶非线性估计精度,估计精度高 于 EKF⁃SLAM、UKF⁃SLAM、FastSLAM; 建议分布函数引入最近的观测值,估计精度 高于 UFastSLAM、 FastSLAM 算 法, 复 杂 度 高 于 FastSLAM; 利用容积卡尔曼滤波产生建议分布函数,估 计精度高于 UFastSLAM、FastSLAM 算法,耗时少; 容积律计算非线性转移概率密度,容积律具 有 3 阶非线性估计精度,粒子数目少时,性能优 于 UFastSLAM 与 FastSLAM。 SVD⁃SLAM 优点:不需要线性化 模型, 降 维, 具 有 计 算 量 小、跟踪性能好,避免了运 动模型的偏差和“绑架”问 题; 缺点:依据实际情况 不同,如病态矩阵。 协方差矩阵奇异值分 解[37⁃38] 路标 矩 阵 奇 异 值 分 解[40] 避免了协方差阵的求逆运算、计算误差和舍 入误差,保证了状态协方差矩阵失去正定性,减 少计算量,提高了算法的稳定性; 把 SLAM 看做矩阵分解过程,解耦距离矩阵 为路标信息矩阵和机器人位姿矩阵,有效抑制噪 声对滤波的影响,定位精度高,实时性高。 第 5 期 刘建华,等:测距式传感器同时定位与地图创建综述 ·659·