点击下载:电子科技大学:《智能嵌入式系统设计》课程教学资源(课件讲稿)人机交互(主讲:庄杰)
正在加载图片...
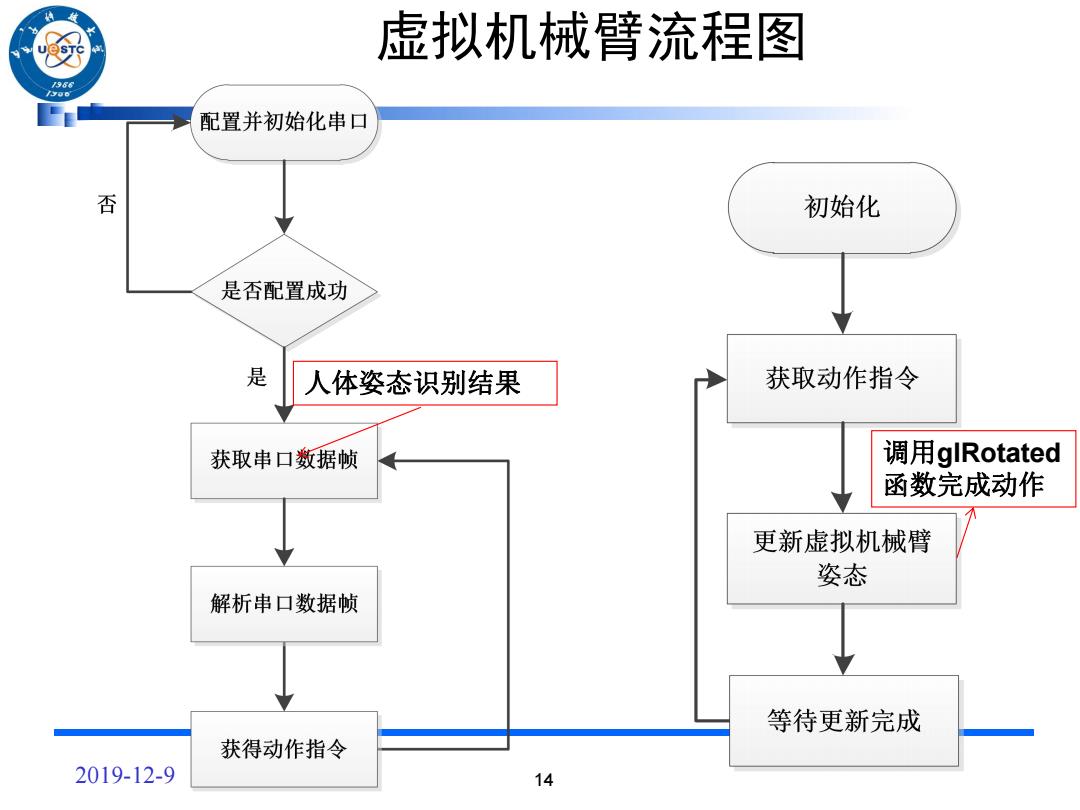
虚拟机械臂流程图 7986 配置并初始化串口 否 初始化 是否配置成功 是 人体姿态识别结果 获取动作指令 获取串口数据帧 调用glRotated 函数完成动作 更新虚拟机械臂 姿态 解析串口数据帧 等待更新完成 获得动作指令 2019-12-9 14虚拟机械臂流程图 2019-12-9 14 人体姿态识别结果 调用glRotated 函数完成动作
<<向上翻页
向下翻页>>
点击下载:电子科技大学:《智能嵌入式系统设计》课程教学资源(课件讲稿)人机交互(主讲:庄杰)
©2008-现在 cucdc.com 高等教育资讯网 版权所有