正在加载图片...
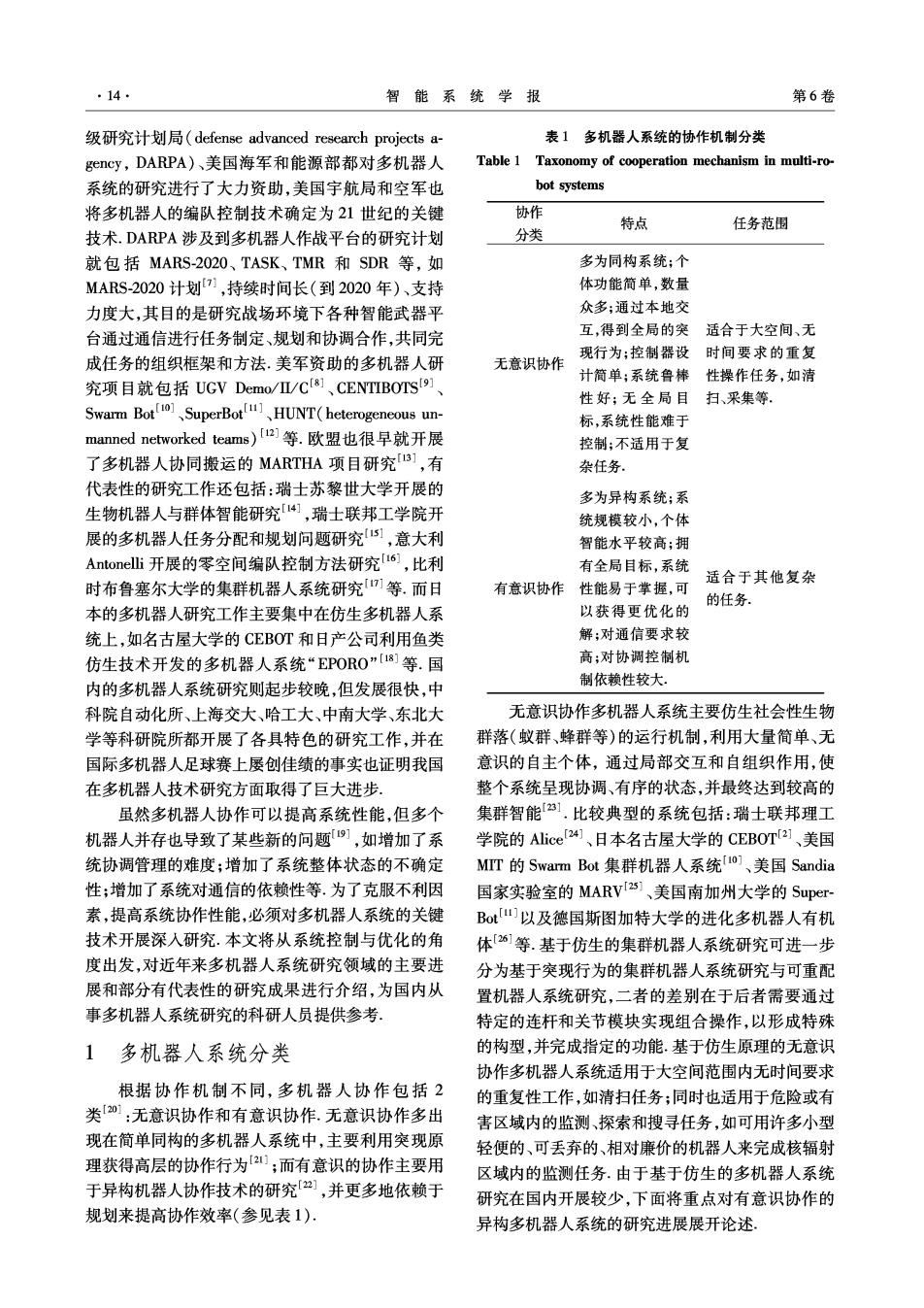
·14 智能系统学报 第6卷 级研究计划局(defense advanced research projects a- 表1多机器人系统的协作机制分类 gency,DARPA)、美国海军和能源部都对多机器人 Table 1 Taxonomy of cooperation mechanism in multi-ro- 系统的研究进行了大力资助,美国宇航局和空军也 bot systems 将多机器人的编队控制技术确定为21世纪的关键 协作 分类 特点 任务范围 技术.DARPA涉及到多机器人作战平台的研究计划 就包括MARS-2020、TASK、TMR和SDR等,如 多为同构系统:个 MARS-2020计划71,持续时间长(到2020年)、支持 体功能简单,数量 力度大,其目的是研究战场环境下各种智能武器平 众多;通过本地交 台通过通信进行任务制定、规划和协调合作,共同完 互,得到全局的突 适合于大空间、无 成任务的组织框架和方法.美军资助的多机器人研 现行为;控制器设 时间要求的重复 无意识协作 计简单;系统鲁棒 性操作任务,如清 究项目就包括UGV Demo///C[]、CENTIBOTS) 性好;无全局目 扫、采集等 Swarm BotSuperBot HUNT(heterogeneous un- 标,系统性能难于 manned networked teams)[2]等.欧盟也很早就开展 控制;不适用于复 了多机器人协同搬运的MARTHA项目研究B1,有 杂任务。 代表性的研究工作还包括:瑞士苏黎世大学开展的 多为异构系统:系 生物机器人与群体智能研究4],瑞士联邦工学院开 统规模较小,个体 展的多机器人任务分配和规划问题研究5],意大利 智能水平较高;拥 Antonelli开展的零空间编队控制方法研究16),比利 有全局目标,系统 时布鲁塞尔大学的集群机器人系统研究]等.而日 适合于其他复杂 有意识协作性能易于掌握,可 的任务. 本的多机器人研究工作主要集中在仿生多机器人系 以获得更优化的 统上,如名古屋大学的CEB0T和日产公司利用鱼类 解;对通信要求较 仿生技术开发的多机器人系统“EPORO”[18]等.国 高;对协调控制机 内的多机器人系统研究则起步较晚,但发展很快,中 制依赖性较大。 科院自动化所、上海交大、哈工大、中南大学、东北大 无意识协作多机器人系统主要仿生社会性生物 学等科研院所都开展了各具特色的研究工作,并在 群落(蚁群、蜂群等)的运行机制,利用大量简单、无 国际多机器人足球赛上屡创佳绩的事实也证明我国 意识的自主个体,通过局部交互和自组织作用,使 在多机器人技术研究方面取得了巨大进步】 整个系统呈现协调、有序的状态,并最终达到较高的 虽然多机器人协作可以提高系统性能,但多个 集群智能21.比较典型的系统包括:瑞士联邦理工 机器人并存也导致了某些新的问题9],如增加了系 学院的Alice24]、日本名古屋大学的CEB0T2]、美国 统协调管理的难度;增加了系统整体状态的不确定 MT的Swarm Bot集群机器人系统[io]、美国Sandia 性;增加了系统对通信的依赖性等.为了克服不利因 国家实验室的MARVI2)、美国南加州大学的Super- 素,提高系统协作性能,必须对多机器人系统的关键 Bot)以及德国斯图加特大学的进化多机器人有机 技术开展深入研究.本文将从系统控制与优化的角 体]等.基于仿生的集群机器人系统研究可进一步 度出发,对近年来多机器人系统研究领域的主要进 分为基于突现行为的集群机器人系统研究与可重配 展和部分有代表性的研究成果进行介绍,为国内从 置机器人系统研究,二者的差别在于后者需要通过 事多机器人系统研究的科研人员提供参考 特定的连杆和关节模块实现组合操作,以形成特殊 1多机器人系统分类 的构型,并完成指定的功能.基于仿生原理的无意识 协作多机器人系统适用于大空间范围内无时间要求 根据协作机制不同,多机器人协作包括2 的重复性工作,如清扫任务;同时也适用于危险或有 类0:无意识协作和有意识协作.无意识协作多出 害区域内的监测、探索和搜寻任务,如可用许多小型 现在简单同构的多机器人系统中,主要利用突现原 轻便的、可丢弃的、相对廉价的机器人来完成核辐射 理获得高层的协作行为[21]:而有意识的协作主要用 区域内的监测任务.由于基于仿生的多机器人系统 于异构机器人协作技术的研究[22],并更多地依赖于 研究在国内开展较少,下面将重点对有意识协作的 规划来提高协作效率(参见表1). 异构多机器人系统的研究进展展开论述