正在加载图片...
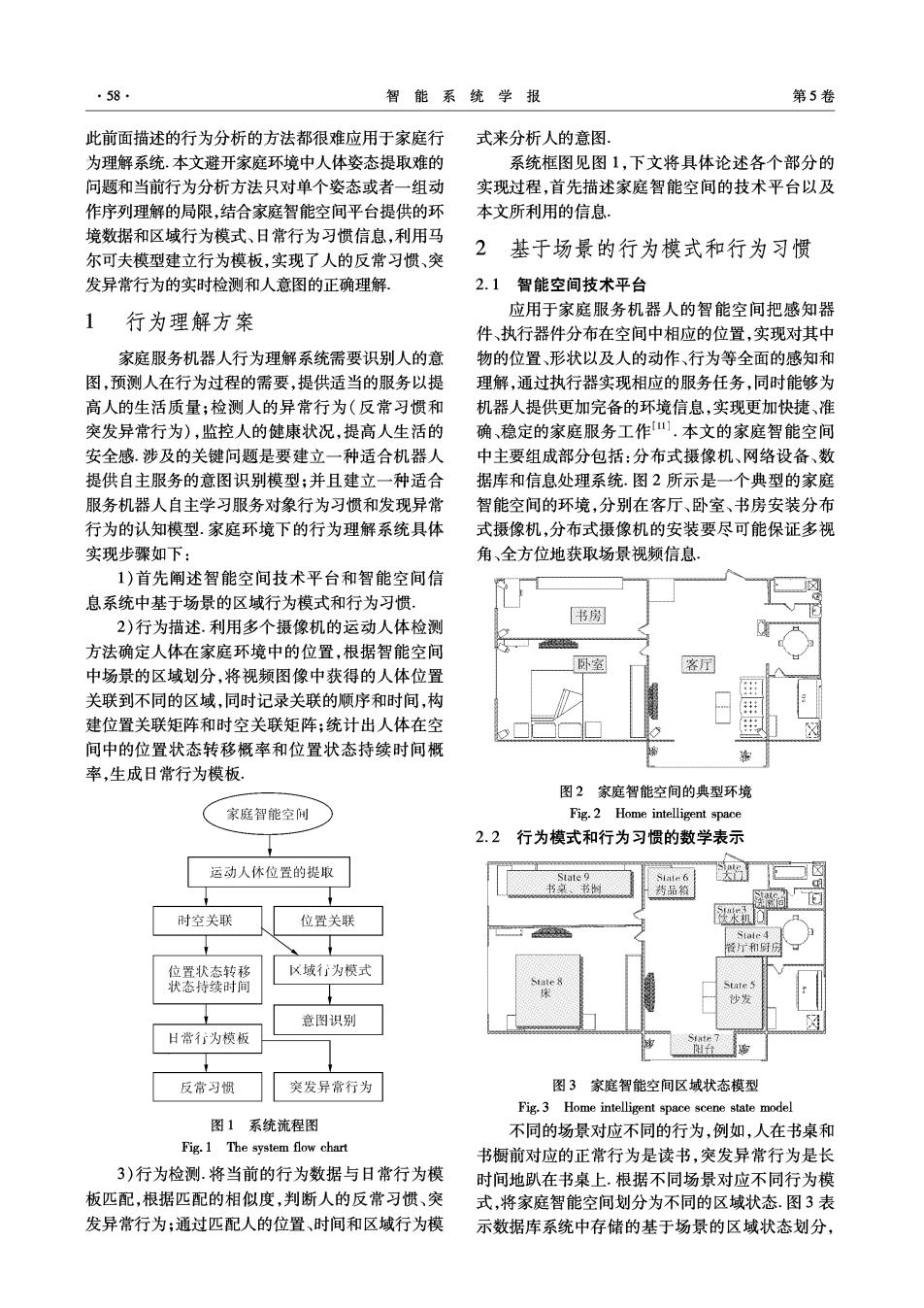
58 智能系统学报 第5卷 此前面描述的行为分析的方法都很雅推应用于家庭行 式来分析人的意图 为理解系统.本文避开家庭环境中人体姿态提取难的 系统框图见图1,下文将具体论述各个部分的 问题和当前行为分析方法只对单个姿态或者一组动 实现过程,首先描述家庭智能空间的技术平台以及 作序列理解的局限,结合家庭智能空间平台提供的环 本文所利用的信息 境数据和区域行为模式、日常行为习惯信息,利用马 尔可夫模型建立行为模板,实现了人的反常习惯、突 2基于场景的行为模式和行为习惯 发异常行为的实时检测和人意图的正确理解。 2.1智能空间技术平台 应用于家庭服务机器人的智能空间把感知器 1 行为理解方案 件、执行器件分布在空间中相应的位置,实现对其中 家庭服务机器人行为理解系统需要识别人的意 物的位置、形状以及人的动作、行为等全面的感知和 图,预测人在行为过程的需要,提供适当的服务以提 理解,通过执行器实现相应的服务任务,同时能够为 高人的生活质量:检测人的异常行为(反常习惯和 机器人提供更加完备的环境信息,实现更加快捷、准 突发异常行为),监控人的健康状况,提高人生活的 确、稳定的家庭服务工作.本文的家庭智能空间 安全感.涉及的关键问题是要建立一种适合机器人 中主要组成部分包括:分布式摄像机、网络设备、数 提供自主服务的意图识别模型;并且建立一种适合 据库和信息处理系统.图2所示是一个典型的家庭 服务机器人自主学习服务对象行为习惯和发现异常 智能空间的环境,分别在客厅、卧室、书房安装分布 行为的认知模型.家庭环境下的行为理解系统具体 式摄像机,分布式镊像机的安装要尽可能保证多视 实现步骤如下: 角、全方位地获取场景视频信息, 1)首先阐述智能空间技术平台和智能空间信 息系统中基于场景的区域行为模式和行为习惯, 书房 2)行为描述.利用多个摄像机的运动人体检测 方法确定人体在家庭环境中的位置,根据智能空间 卧室留 中场景的区域划分,将视频图像中获得的人体位置 客厅 关联到不同的区域,同时记录关联的顺序和时间,构 建位置关联矩阵和时空关联矩阵;统计出人体在空 间中的位置状态转移概率和位置状态持续时间概 海 率,生成日常行为模板。 图2家庭智能空间的典型环境 家庭智能空间 Fig.2 Home intelligent space 2.2行为模式和行为习惯的数学表示 运动人休位置的提取 ☒ State 9 书菜、书四 药品篇 时空关联 位置关联 时 位置状态转移 仗域行为模式 状态持续时间 沙发 意图识别 日常为模板 反常习惯 突发异常行为 图3家庭智能空间区域状态模型 Fig.3 Home intelligent space scene state model 图1系统流程图 不同的场景对应不同的行为,例如,人在书桌和 Fig.1 The system flow chart 书橱前对应的正常行为是读书,突发异常行为是长 3)行为检测.将当前的行为数据与日常行为模 时间地趴在书桌上,根据不同场景对应不同行为模 板匹配,根据匹配的相似度,判断人的反常习惯、突 式,将家庭智能空间划分为不同的区域状态.图3表 发异常行为;通过匹配人的位置、时间和区域行为模 示数据库系统中存储的基于场景的区域状态划分