正在加载图片...
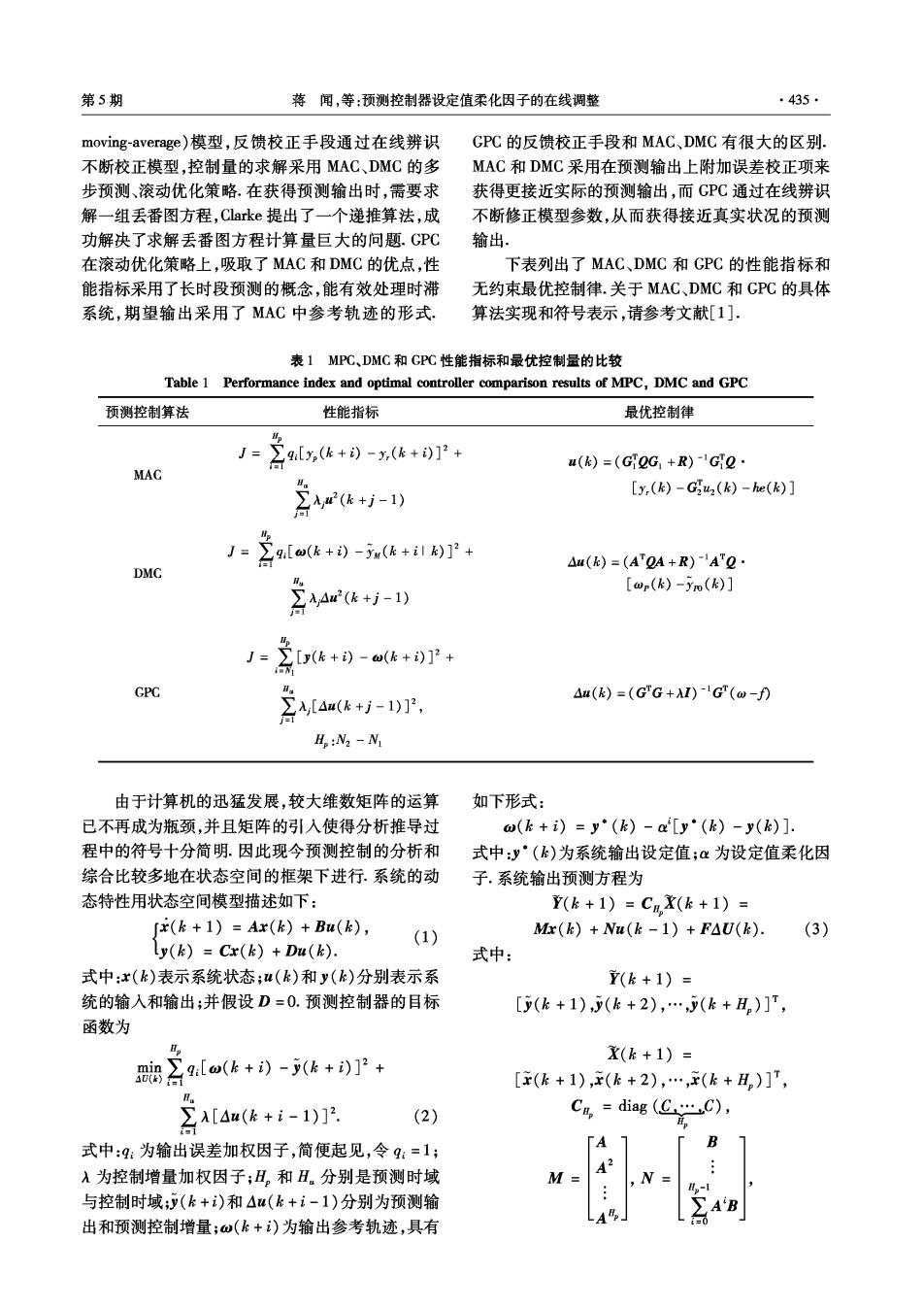
第5期 蒋闻,等:预测控制器设定值柔化因子的在线调整 ·435· moving-average)模型,反馈校正手段通过在线辨识 GPC的反馈校正手段和MAC、DMC有很大的区别. 不断校正模型,控制量的求解采用MAC、DMC的多 MAC和DMC采用在预测输出上附加误差校正项来 步预测、滚动优化策略.在获得预测输出时,需要求 获得更接近实际的预测输出,而GPC通过在线辨识 解一组丢番图方程,Clarke提出了一个递推算法,成 不断修正模型参数,从而获得接近真实状况的预测 功解决了求解丢番图方程计算量巨大的问题.GPC 输出. 在滚动优化策略上,吸取了MAC和DMC的优点,性 下表列出了MAC、DMC和GPC的性能指标和 能指标采用了长时段预测的概念,能有效处理时滞 无约束最优控制律.关于MAC、DMC和GPC的具体 系统,期望输出采用了MAC中参考轨迹的形式 算法实现和符号表示,请参考文献[1]. 表1MPC、DMC和GPC性能指标和最优控制量的比较 Table 1 Performance index and optimal controller comparison results of MPC,DMC and GPC 预测控制算法 性能指标 最优控制律 J= q:[y(k+)-y,(k+)]2+ u(k)=(G2G1+R)G2· MAC 之AP(k+-1) [y,(k)-G5u2(k)-he(k)] 2q.[u(k+)-m(k+i1k]2+ J= △u(k)=(A'QA+R)A"Q· DMC (-1) [op(k)-yro(k)] J= 2(k+》-w(k+0]2+ GPC 2A[aa(k+j-1)], Au(k)=(GG+AI)-GT(@-f) H:N2 -N 由于计算机的迅猛发展,较大维数矩阵的运算 如下形式: 已不再成为瓶颈,并且矩阵的引入使得分析推导过 w(k+)=y·(k)-a[y·(k)-y(k)]. 程中的符号十分简明.因此现今预测控制的分析和 式中:y·(k)为系统输出设定值;α为设定值柔化因 综合比较多地在状态空间的框架下进行.系统的动 子.系统输出预测方程为 态特性用状态空间模型描述如下: Y(k+1)=C,X(k+1)= (k+1)=Ax(k)+Bu(k), (1) Mx(k)Nu(k -1)+FAU(k). (3) Ly(k)=Cx(k)+Du(k). 式中: 式中:x(k)表示系统状态;u(k)和y(k)分别表示系 (k+1)= 统的输入和输出;并假设D=0.预测控制器的目标 [少(k+1),(k+2),…,(k+H)]T, 函数为 X(k+1)= 名(k+)-k+i)]'+ [(k+1),(k+2),…,(k+H)]T, 龙Aa+i-1DP (2) C,=diag(C…C), 式中:9:为输出误差加权因子,简便起见,令9:=1; A B 42 入为控制增量加权因子;H。和H。分别是预测时域 ,N= H-1 与控制时域;y(k+)和△u(k+i-1)分别为预测输 出和预测控制增量;ω(k+)为输出参考轨迹,具有