正在加载图片...
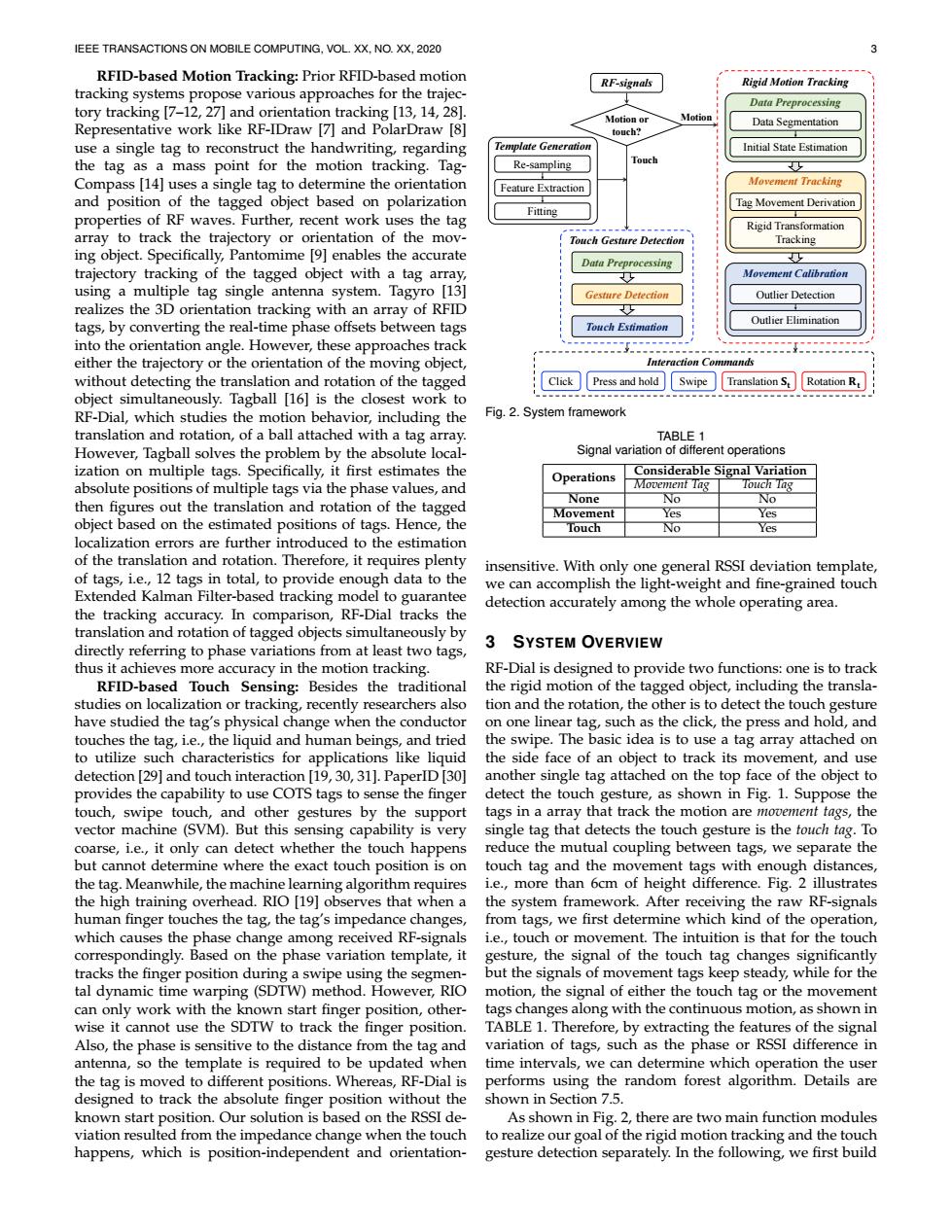
IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.XX,NO.XX,2020 RFID-based Motion Tracking:Prior RFID-based motion RF-signals Rigid Motion Tracking tracking systems propose various approaches for the trajec- tory tracking [7-12,27]and orientation tracking [13,14,28]. Data Preprocessing Motion or Motion Representative work like RF-IDraw [7]and PolarDraw [8] Data Segmentation touch? use a single tag to reconstruct the handwriting,regarding Template Generation Initial State Estimation the tag as a mass point for the motion tracking.Tag- Re-sampling Compass [14]uses a single tag to determine the orientation Feature Extraction Movement Tracking and position of the tagged object based on polarization Tag Movement Derivation properties of RF waves.Further,recent work uses the tag Fitting吗 Rigid Transformation array to track the trajectory or orientation of the mov- Touch Gesture Detection Tracking ing object.Specifically,Pantomime [9]enables the accurate Datu Preprocessing trajectory tracking of the tagged object with a tag array, Movement Calibration using a multiple tag single antenna system.Tagyro [13] Gesture Detection Outlier Detection realizes the 3D orientation tracking with an array of RFID tags,by converting the real-time phase offsets between tags Touch Estimation Outlier Elimination into the orientation angle.However,these approaches track either the trajectory or the orientation of the moving object, Interaction Commands without detecting the translation and rotation of the tagged Click Press and hold Swipe Translation S Rotation R object simultaneously.Tagball 16 is the closest work to RF-Dial,which studies the motion behavior,including the Fig.2.System framework translation and rotation,of a ball attached with a tag array. TABLE 1 However,Tagball solves the problem by the absolute local- Signal variation of different operations ization on multiple tags.Specifically,it first estimates the Operations Considerable Signal Variation absolute positions of multiple tags via the phase values,and Movement Tag Touch Tag None No No then figures out the translation and rotation of the tagged Movement Yes Yes object based on the estimated positions of tags.Hence,the Touch No Yes localization errors are further introduced to the estimation of the translation and rotation.Therefore,it requires plenty insensitive.With only one general RSSI deviation template, of tags,i.e.,12 tags in total,to provide enough data to the we can accomplish the light-weight and fine-grained touch Extended Kalman Filter-based tracking model to guarantee detection accurately among the whole operating area. the tracking accuracy.In comparison,RF-Dial tracks the translation and rotation of tagged objects simultaneously by 3 SYSTEM OVERVIEW directly referring to phase variations from at least two tags, thus it achieves more accuracy in the motion tracking. RF-Dial is designed to provide two functions:one is to track RFID-based Touch Sensing:Besides the traditional the rigid motion of the tagged object,including the transla- studies on localization or tracking,recently researchers also tion and the rotation,the other is to detect the touch gesture have studied the tag's physical change when the conductor on one linear tag,such as the click,the press and hold,and touches the tag,i.e.,the liquid and human beings,and tried the swipe.The basic idea is to use a tag array attached on to utilize such characteristics for applications like liquid the side face of an object to track its movement,and use detection [29]and touch interaction [19,30,31].PaperID [30] another single tag attached on the top face of the object to provides the capability to use COTS tags to sense the finger detect the touch gesture,as shown in Fig.1.Suppose the touch,swipe touch,and other gestures by the support tags in a array that track the motion are movement fags,the vector machine(SVM).But this sensing capability is very single tag that detects the touch gesture is the touch tag.To coarse,i.e.,it only can detect whether the touch happens reduce the mutual coupling between tags,we separate the but cannot determine where the exact touch position is on touch tag and the movement tags with enough distances, the tag.Meanwhile,the machine learning algorithm requires i.e.,more than 6cm of height difference.Fig.2 illustrates the high training overhead.RIO [19]observes that when a the system framework.After receiving the raw RF-signals human finger touches the tag,the tag's impedance changes, from tags,we first determine which kind of the operation, which causes the phase change among received RF-signals i.e.,touch or movement.The intuition is that for the touch correspondingly.Based on the phase variation template,it gesture,the signal of the touch tag changes significantly tracks the finger position during a swipe using the segmen- but the signals of movement tags keep steady,while for the tal dynamic time warping (SDTW)method.However,RIO motion,the signal of either the touch tag or the movement can only work with the known start finger position,other- tags changes along with the continuous motion,as shown in wise it cannot use the SDTW to track the finger position. TABLE 1.Therefore,by extracting the features of the signal Also,the phase is sensitive to the distance from the tag and variation of tags,such as the phase or RSSI difference in antenna,so the template is required to be updated when time intervals,we can determine which operation the user the tag is moved to different positions.Whereas,RF-Dial is performs using the random forest algorithm.Details are designed to track the absolute finger position without the shown in Section 7.5. known start position.Our solution is based on the RSSI de- As shown in Fig.2,there are two main function modules viation resulted from the impedance change when the touch to realize our goal of the rigid motion tracking and the touch happens,which is position-independent and orientation- gesture detection separately.In the following,we first buildIEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. XX, NO. XX, 2020 3 RFID-based Motion Tracking: Prior RFID-based motion tracking systems propose various approaches for the trajectory tracking [7–12, 27] and orientation tracking [13, 14, 28]. Representative work like RF-IDraw [7] and PolarDraw [8] use a single tag to reconstruct the handwriting, regarding the tag as a mass point for the motion tracking. TagCompass [14] uses a single tag to determine the orientation and position of the tagged object based on polarization properties of RF waves. Further, recent work uses the tag array to track the trajectory or orientation of the moving object. Specifically, Pantomime [9] enables the accurate trajectory tracking of the tagged object with a tag array, using a multiple tag single antenna system. Tagyro [13] realizes the 3D orientation tracking with an array of RFID tags, by converting the real-time phase offsets between tags into the orientation angle. However, these approaches track either the trajectory or the orientation of the moving object, without detecting the translation and rotation of the tagged object simultaneously. Tagball [16] is the closest work to RF-Dial, which studies the motion behavior, including the translation and rotation, of a ball attached with a tag array. However, Tagball solves the problem by the absolute localization on multiple tags. Specifically, it first estimates the absolute positions of multiple tags via the phase values, and then figures out the translation and rotation of the tagged object based on the estimated positions of tags. Hence, the localization errors are further introduced to the estimation of the translation and rotation. Therefore, it requires plenty of tags, i.e., 12 tags in total, to provide enough data to the Extended Kalman Filter-based tracking model to guarantee the tracking accuracy. In comparison, RF-Dial tracks the translation and rotation of tagged objects simultaneously by directly referring to phase variations from at least two tags, thus it achieves more accuracy in the motion tracking. RFID-based Touch Sensing: Besides the traditional studies on localization or tracking, recently researchers also have studied the tag’s physical change when the conductor touches the tag, i.e., the liquid and human beings, and tried to utilize such characteristics for applications like liquid detection [29] and touch interaction [19, 30, 31]. PaperID [30] provides the capability to use COTS tags to sense the finger touch, swipe touch, and other gestures by the support vector machine (SVM). But this sensing capability is very coarse, i.e., it only can detect whether the touch happens but cannot determine where the exact touch position is on the tag. Meanwhile, the machine learning algorithm requires the high training overhead. RIO [19] observes that when a human finger touches the tag, the tag’s impedance changes, which causes the phase change among received RF-signals correspondingly. Based on the phase variation template, it tracks the finger position during a swipe using the segmental dynamic time warping (SDTW) method. However, RIO can only work with the known start finger position, otherwise it cannot use the SDTW to track the finger position. Also, the phase is sensitive to the distance from the tag and antenna, so the template is required to be updated when the tag is moved to different positions. Whereas, RF-Dial is designed to track the absolute finger position without the known start position. Our solution is based on the RSSI deviation resulted from the impedance change when the touch happens, which is position-independent and orientationData Preprocessing Movement Tracking Movement Calibration Outlier Detection Outlier Elimination Tag Movement Derivation Rigid Transformation Tracking Initial State Estimation Data Segmentation Rigid Motion Tracking Touch Gesture Detection Data Preprocessing Gesture Detection Touch Estimation Motion or touch? Motion Touch RF-signals Interaction Commands Click Press and hold Swipe Translation �� Rotation �� Feature Extraction Re-sampling Fitting Template Generation Fig. 2. System framework TABLE 1 Signal variation of different operations Operations Considerable Signal Variation Movement Tag Touch Tag None No No Movement Yes Yes Touch No Yes insensitive. With only one general RSSI deviation template, we can accomplish the light-weight and fine-grained touch detection accurately among the whole operating area. 3 SYSTEM OVERVIEW RF-Dial is designed to provide two functions: one is to track the rigid motion of the tagged object, including the translation and the rotation, the other is to detect the touch gesture on one linear tag, such as the click, the press and hold, and the swipe. The basic idea is to use a tag array attached on the side face of an object to track its movement, and use another single tag attached on the top face of the object to detect the touch gesture, as shown in Fig. 1. Suppose the tags in a array that track the motion are movement tags, the single tag that detects the touch gesture is the touch tag. To reduce the mutual coupling between tags, we separate the touch tag and the movement tags with enough distances, i.e., more than 6cm of height difference. Fig. 2 illustrates the system framework. After receiving the raw RF-signals from tags, we first determine which kind of the operation, i.e., touch or movement. The intuition is that for the touch gesture, the signal of the touch tag changes significantly but the signals of movement tags keep steady, while for the motion, the signal of either the touch tag or the movement tags changes along with the continuous motion, as shown in TABLE 1. Therefore, by extracting the features of the signal variation of tags, such as the phase or RSSI difference in time intervals, we can determine which operation the user performs using the random forest algorithm. Details are shown in Section 7.5. As shown in Fig. 2, there are two main function modules to realize our goal of the rigid motion tracking and the touch gesture detection separately. In the following, we first build