正在加载图片...
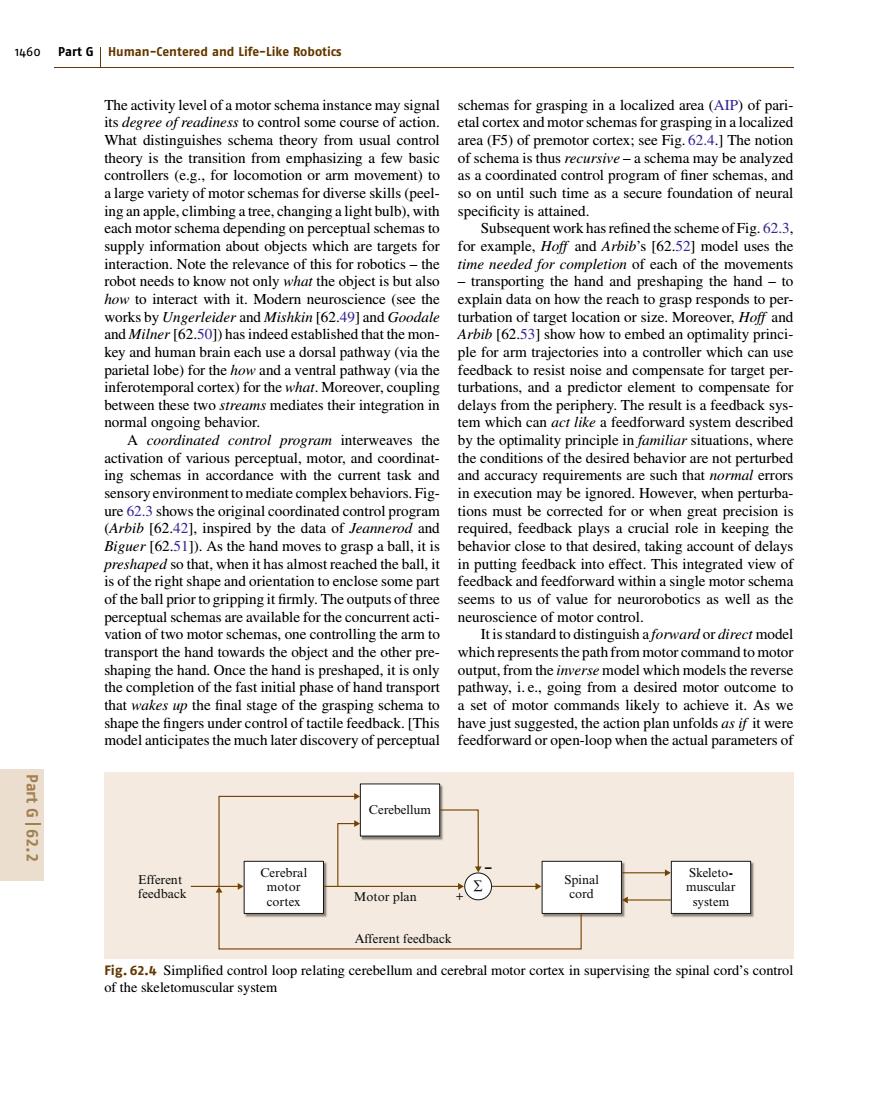
1460 Part G Human-Centered and Life-Like Robotics The activity level of a motor schema instance may signal schemas for grasping in a localized area (AIP)of pari- its degree of readiness to control some course of action. etal cortex and motor schemas for grasping in a localized What distinguishes schema theory from usual control area(F5)of premotor cortex;see Fig.62.4.]The notion theory is the transition from emphasizing a few basic of schema is thus recursive-a schema may be analyzed controllers (e.g.,for locomotion or arm movement)to as a coordinated control program of finer schemas,and a large variety of motor schemas for diverse skills(peel-so on until such time as a secure foundation of neural ing an apple,climbing a tree,changing a light bulb),with specificity is attained. each motor schema depending on perceptual schemas to Subsequent work has refined the scheme of Fig.62.3, supply information about objects which are targets for for example,Hoff and Arbib's [62.52]model uses the interaction.Note the relevance of this for robotics-the time needed for completion of each of the movements robot needs to know not only what the obiect is but also transporting the hand and preshaping the hand-to how to interact with it.Modern neuroscience (see the explain data on how the reach to grasp responds to per- works by Ungerleider and Mishkin [62.49]and Goodale turbation of target location or size.Moreover,Hoff and and Milner [62.50])has indeed established that the mon-Arbib [62.53]show how to embed an optimality princi- key and human brain each use a dorsal pathway(via the ple for arm trajectories into a controller which can use parietal lobe)for the how and a ventral pathway(via the feedback to resist noise and compensate for target per- inferotemporal cortex)for the what.Moreover,coupling turbations,and a predictor element to compensate for between these two streams mediates their integration in delays from the periphery.The result is a feedback sys- normal ongoing behavior. tem which can act like a feedforward system described A coordinated control program interweaves the by the optimality principle in familiar situations,where activation of various perceptual,motor,and coordinat- the conditions of the desired behavior are not perturbed ing schemas in accordance with the current task and and accuracy requirements are such that normal errors sensory environment to mediate complex behaviors.Fig- in execution may be ignored.However,when perturba- ure 62.3 shows the original coordinated control program tions must be corrected for or when great precision is (Arbib [62.42],inspired by the data of Jeannerod and required,feedback plays a crucial role in keeping the Biguer [62.511).As the hand moves to grasp a ball,it is behavior close to that desired,taking account of delays preshaped so that,when it has almost reached the ball,it in putting feedback into effect.This integrated view of is of the right shape and orientation to enclose some part feedback and feedforward within a single motor schema of the ball prior to gripping it firmly.The outputs of three seems to us of value for neurorobotics as well as the perceptual schemas are available for the concurrent acti- neuroscience of motor control. vation of two motor schemas,one controlling the arm to It is standard to distinguish a forward or direct model transport the hand towards the object and the other pre- which represents the path from motor command to motor shaping the hand.Once the hand is preshaped,it is only output,from the inverse model which models the reverse the completion of the fast initial phase of hand transport pathway,i.e.,going from a desired motor outcome to that wakes up the final stage of the grasping schema to a set of motor commands likely to achieve it.As we shape the fingers under control of tactile feedback.[This have just suggested,the action plan unfolds as if it were model anticipates the much later discovery of perceptual feedforward or open-loop when the actual parameters of Part G62.2 Cerebellum Efferent Cerebral Spinal Skeleto- feedback motor muscular cortex Motor plan cord system Afferent feedback Fig.62.4 Simplified control loop relating cerebellum and cerebral motor cortex in supervising the spinal cord's control of the skeletomuscular system1460 Part G Human-Centered and Life-Like Robotics The activity level of a motor schema instance may signal its degree of readiness to control some course of action. What distinguishes schema theory from usual control theory is the transition from emphasizing a few basic controllers (e.g., for locomotion or arm movement) to a large variety of motor schemas for diverse skills (peeling an apple, climbing a tree, changing a light bulb), with each motor schema depending on perceptual schemas to supply information about objects which are targets for interaction. Note the relevance of this for robotics – the robot needs to know not only what the object is but also how to interact with it. Modern neuroscience (see the works by Ungerleider and Mishkin [62.49] and Goodale and Milner [62.50]) has indeed established that the monkey and human brain each use a dorsal pathway (via the parietal lobe) for the how and a ventral pathway (via the inferotemporal cortex) for the what. Moreover, coupling between these two streams mediates their integration in normal ongoing behavior. A coordinated control program interweaves the activation of various perceptual, motor, and coordinating schemas in accordance with the current task and sensory environment to mediate complex behaviors. Figure 62.3 shows the original coordinated control program (Arbib [62.42], inspired by the data of Jeannerod and Biguer [62.51]). As the hand moves to grasp a ball, it is preshaped so that, when it has almost reached the ball, it is of the right shape and orientation to enclose some part of the ball prior to gripping it firmly. The outputs of three perceptual schemas are available for the concurrent activation of two motor schemas, one controlling the arm to transport the hand towards the object and the other preshaping the hand. Once the hand is preshaped, it is only the completion of the fast initial phase of hand transport that wakes up the final stage of the grasping schema to shape the fingers under control of tactile feedback. [This model anticipates the much later discovery of perceptual Efferent feedback Cerebral motor cortex Cerebellum Motor plan ∑ Afferent feedback + – Skeletomuscular system Spinal cord Fig. 62.4 Simplified control loop relating cerebellum and cerebral motor cortex in supervising the spinal cord’s control of the skeletomuscular system schemas for grasping in a localized area (AIP) of parietal cortex and motor schemas for grasping in a localized area (F5) of premotor cortex; see Fig. 62.4.] The notion of schema is thus recursive – a schema may be analyzed as a coordinated control program of finer schemas, and so on until such time as a secure foundation of neural specificity is attained. Subsequent work has refined the scheme of Fig. 62.3, for example, Hoff and Arbib’s [62.52] model uses the time needed for completion of each of the movements – transporting the hand and preshaping the hand – to explain data on how the reach to grasp responds to perturbation of target location or size. Moreover, Hoff and Arbib [62.53] show how to embed an optimality principle for arm trajectories into a controller which can use feedback to resist noise and compensate for target perturbations, and a predictor element to compensate for delays from the periphery. The result is a feedback system which can act like a feedforward system described by the optimality principle in familiar situations, where the conditions of the desired behavior are not perturbed and accuracy requirements are such that normal errors in execution may be ignored. However, when perturbations must be corrected for or when great precision is required, feedback plays a crucial role in keeping the behavior close to that desired, taking account of delays in putting feedback into effect. This integrated view of feedback and feedforward within a single motor schema seems to us of value for neurorobotics as well as the neuroscience of motor control. It is standard to distinguish a forward or direct model which represents the path from motor command to motor output, from the inverse model which models the reverse pathway, i. e., going from a desired motor outcome to a set of motor commands likely to achieve it. As we have just suggested, the action plan unfolds as if it were feedforward or open-loop when the actual parameters of Part G 62.2