正在加载图片...
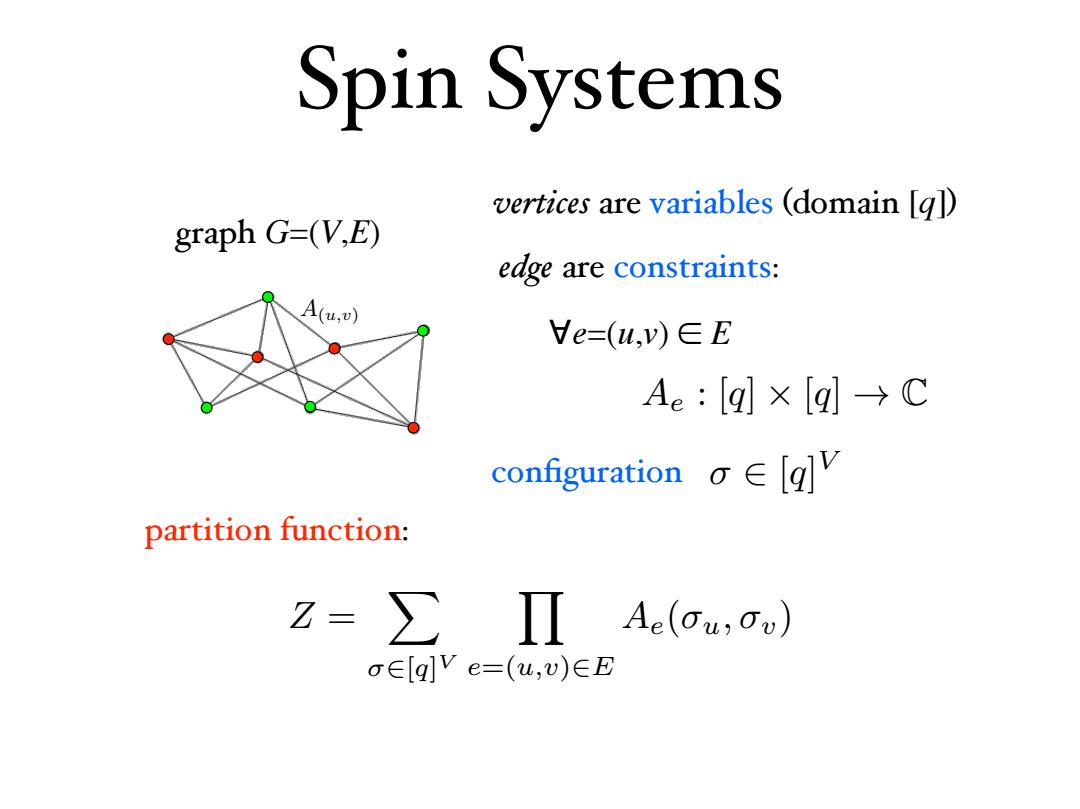
Spin Systems vertices are variables (domain [gl) graph G=(V,E) edge are constraints: A(u,v) Ve=(u,y)∈E Ae:[gl×[gl→C configuration o∈[g]'Y partition function: Z=∑ΠAe(ou,o) o∈[g]Ve=(u,v)eESpin Systems vertices are variables (domain [q]) edge are constraints: graph G=(V,E) configuration partition function: 2 [q] V A(u,v) Z = X 2[q]V Y e=(u,v)2E Ae(u, v) Ae : [q] ⇥ [q] ! C ∀e=(u,v) ∈ E