正在加载图片...
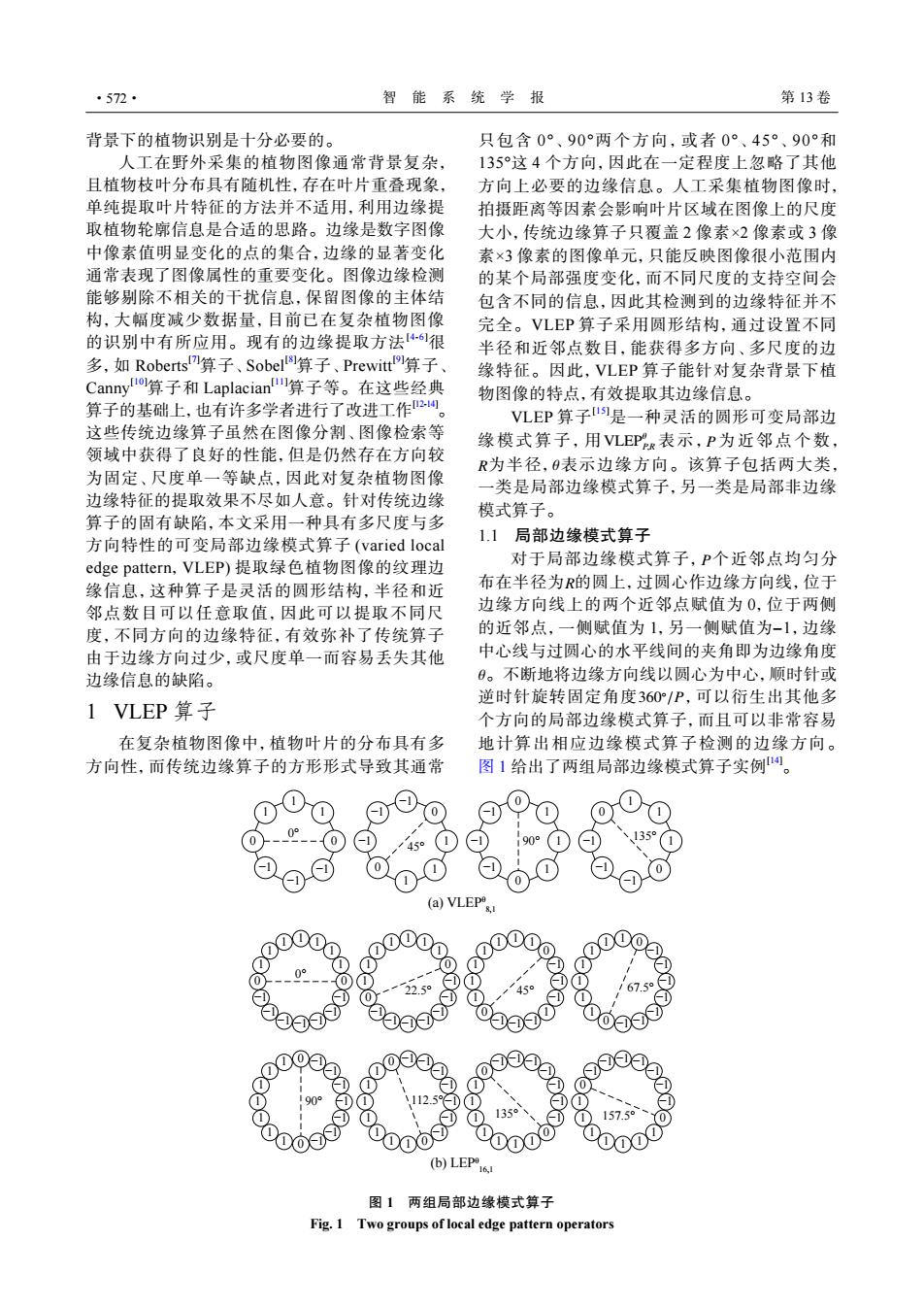
·572· 智能系统学报 第13卷 背景下的植物识别是十分必要的。 只包含0°、90°两个方向,或者0°、45°、90°和 人工在野外采集的植物图像通常背景复杂, 135°这4个方向,因此在一定程度上忽略了其他 且植物枝叶分布具有随机性,存在叶片重叠现象, 方向上必要的边缘信息。人工采集植物图像时, 单纯提取叶片特征的方法并不适用,利用边缘提 拍摄距离等因素会影响叶片区域在图像上的尺度 取植物轮廓信息是合适的思路。边缘是数字图像 大小,传统边缘算子只覆盖2像素×2像素或3像 中像素值明显变化的点的集合,边缘的显著变化 素×3像素的图像单元,只能反映图像很小范围内 通常表现了图像属性的重要变化。图像边缘检测 的某个局部强度变化,而不同尺度的支持空间会 能够剔除不相关的干扰信息,保留图像的主体结 包含不同的信息,因此其检测到的边缘特征并不 构,大幅度减少数据量,目前已在复杂植物图像 完全。VLEP算子采用圆形结构,通过设置不同 的识别中有所应用。现有的边缘提取方法4很 半径和近邻点数目,能获得多方向、多尺度的边 多,如Roberts算子、Sobel!算子、Prewitt算子、 缘特征。因此,VLEP算子能针对复杂背景下植 Cannyto算子和Laplacian算子等。在这些经典 物图像的特点,有效提取其边缘信息。 算子的基础上,也有许多学者进行了改进工作2。 VLEP算子是一种灵活的圆形可变局部边 这些传统边缘算子虽然在图像分割、图像检索等 缘模式算子,用VLEPER表示,P为近邻点个数, 领域中获得了良好的性能,但是仍然存在方向较 R为半径,0表示边缘方向。该算子包括两大类, 为固定、尺度单一等缺点,因此对复杂植物图像 一类是局部边缘模式算子,另一类是局部非边缘 边缘特征的提取效果不尽如人意。针对传统边缘 模式算子。 算子的固有缺陷,本文采用一种具有多尺度与多 1.1 方向特性的可变局部边缘模式算子(varied local 局部边缘模式算子 edge pattern,VLEP)提取绿色植物图像的纹理边 对于局部边缘模式算子,P个近邻点均匀分 缘信息,这种算子是灵活的圆形结构,半径和近 布在半径为的圆上,过圆心作边缘方向线,位于 邻点数目可以任意取值,因此可以提取不同尺 边缘方向线上的两个近邻点赋值为0,位于两侧 度,不同方向的边缘特征,有效弥补了传统算子 的近邻点,一侧赋值为1,另一侧赋值为-1,边缘 由于边缘方向过少,或尺度单一而容易丢失其他 中心线与过圆心的水平线间的夹角即为边缘角度 边缘信息的缺陷。 。不断地将边缘方向线以圆心为中心,顺时针或 逆时针旋转固定角度360°/P,可以衍生出其他多 VLEP算子 个方向的局部边缘模式算子,而且可以非常容易 在复杂植物图像中,植物叶片的分布具有多 地计算出相应边缘模式算子检测的边缘方向。 方向性,而传统边缘算子的方形形式导致其通常 图1给出了两组局部边缘模式算子实例。 0 0° 45①( 190°(1 -1 .135° (a)VLEPs 0000b 00 0)(1 22.5 )( (I) 45o 7.5 (1) (0 (① 190° 112.51(1) 1350 157.59 0 (b)LEP 图1两组局部边缘模式算子 Fig.1 Two groups of local edge pattern operators背景下的植物识别是十分必要的。 人工在野外采集的植物图像通常背景复杂, 且植物枝叶分布具有随机性,存在叶片重叠现象, 单纯提取叶片特征的方法并不适用,利用边缘提 取植物轮廓信息是合适的思路。边缘是数字图像 中像素值明显变化的点的集合,边缘的显著变化 通常表现了图像属性的重要变化。图像边缘检测 能够剔除不相关的干扰信息,保留图像的主体结 构,大幅度减少数据量,目前已在复杂植物图像 的识别中有所应用。现有的边缘提取方法[4-6]很 多,如 Roberts[7]算子、Sobel[8]算子、Prewitt[9]算子、 Canny[10]算子和 Laplacian[11]算子等。在这些经典 算子的基础上,也有许多学者进行了改进工作[12-14]。 这些传统边缘算子虽然在图像分割、图像检索等 领域中获得了良好的性能,但是仍然存在方向较 为固定、尺度单一等缺点,因此对复杂植物图像 边缘特征的提取效果不尽如人意。针对传统边缘 算子的固有缺陷,本文采用一种具有多尺度与多 方向特性的可变局部边缘模式算子 (varied local edge pattern,VLEP) 提取绿色植物图像的纹理边 缘信息,这种算子是灵活的圆形结构,半径和近 邻点数目可以任意取值,因此可以提取不同尺 度,不同方向的边缘特征,有效弥补了传统算子 由于边缘方向过少,或尺度单一而容易丢失其他 边缘信息的缺陷。 1 VLEP 算子 在复杂植物图像中,植物叶片的分布具有多 方向性,而传统边缘算子的方形形式导致其通常 只包含 0°、90°两个方向,或者 0°、45°、90°和 135°这 4 个方向,因此在一定程度上忽略了其他 方向上必要的边缘信息。人工采集植物图像时, 拍摄距离等因素会影响叶片区域在图像上的尺度 大小,传统边缘算子只覆盖 2 像素×2 像素或 3 像 素×3 像素的图像单元,只能反映图像很小范围内 的某个局部强度变化,而不同尺度的支持空间会 包含不同的信息,因此其检测到的边缘特征并不 完全。VLEP 算子采用圆形结构,通过设置不同 半径和近邻点数目,能获得多方向、多尺度的边 缘特征。因此,VLEP 算子能针对复杂背景下植 物图像的特点,有效提取其边缘信息。 VLEPθ P,R P R θ VLEP 算子[15]是一种灵活的圆形可变局部边 缘模式算子,用 表示, 为近邻点个数, 为半径, 表示边缘方向。该算子包括两大类, 一类是局部边缘模式算子,另一类是局部非边缘 模式算子。 1.1 局部边缘模式算子 P R θ 360◦ /P 对于局部边缘模式算子, 个近邻点均匀分 布在半径为 的圆上,过圆心作边缘方向线,位于 边缘方向线上的两个近邻点赋值为 0,位于两侧 的近邻点,一侧赋值为 1,另一侧赋值为–1,边缘 中心线与过圆心的水平线间的夹角即为边缘角度 。不断地将边缘方向线以圆心为中心,顺时针或 逆时针旋转固定角度 ,可以衍生出其他多 个方向的局部边缘模式算子,而且可以非常容易 地计算出相应边缘模式算子检测的边缘方向。 图 1 给出了两组局部边缘模式算子实例[14]。 1 1 1 0 0 −1 −1 −1 −1 −1 0 0 −1 1 1 1 0 −1 1 −1 −1 1 1 0 1 1 1 0 0 −1 −1 −1 0° 45° 90° 135° (a) VLEPθ 8,1 0° 22.5° 45° 67.5° 1 1 1 1 1 1 1 0 0 −1 −1 −1 −1 −1 −1 −1 1 1 1 1 1 1 1 −1 −1 −1 −1 −1 −1 −1 0 0 −1 1 −1 −1 −1 −1 −1 1 1 1 1 1 1 1 0 0 −1 −1 −1 −1 −1 −1 −1 1 1 1 1 1 1 1 0 0 90° 112.5° 135° 157.5° −1 −1 −1 −1 −1 −1 −1 0 0 1 1 1 1 1 1 1 −1 −1 −1 −1 −1 −1 −1 0 0 1 1 1 1 1 1 1 −1 −1 −1 −1 −1 −1 −1 0 0 1 1 1 1 1 1 1 −1 −1 −1 −1 −1 −1 −1 0 1 1 1 1 1 1 1 0 (b) LEPθ 16,1 图 1 两组局部边缘模式算子 Fig. 1 Two groups of local edge pattern operators ·572· 智 能 系 统 学 报 第 13 卷