正在加载图片...
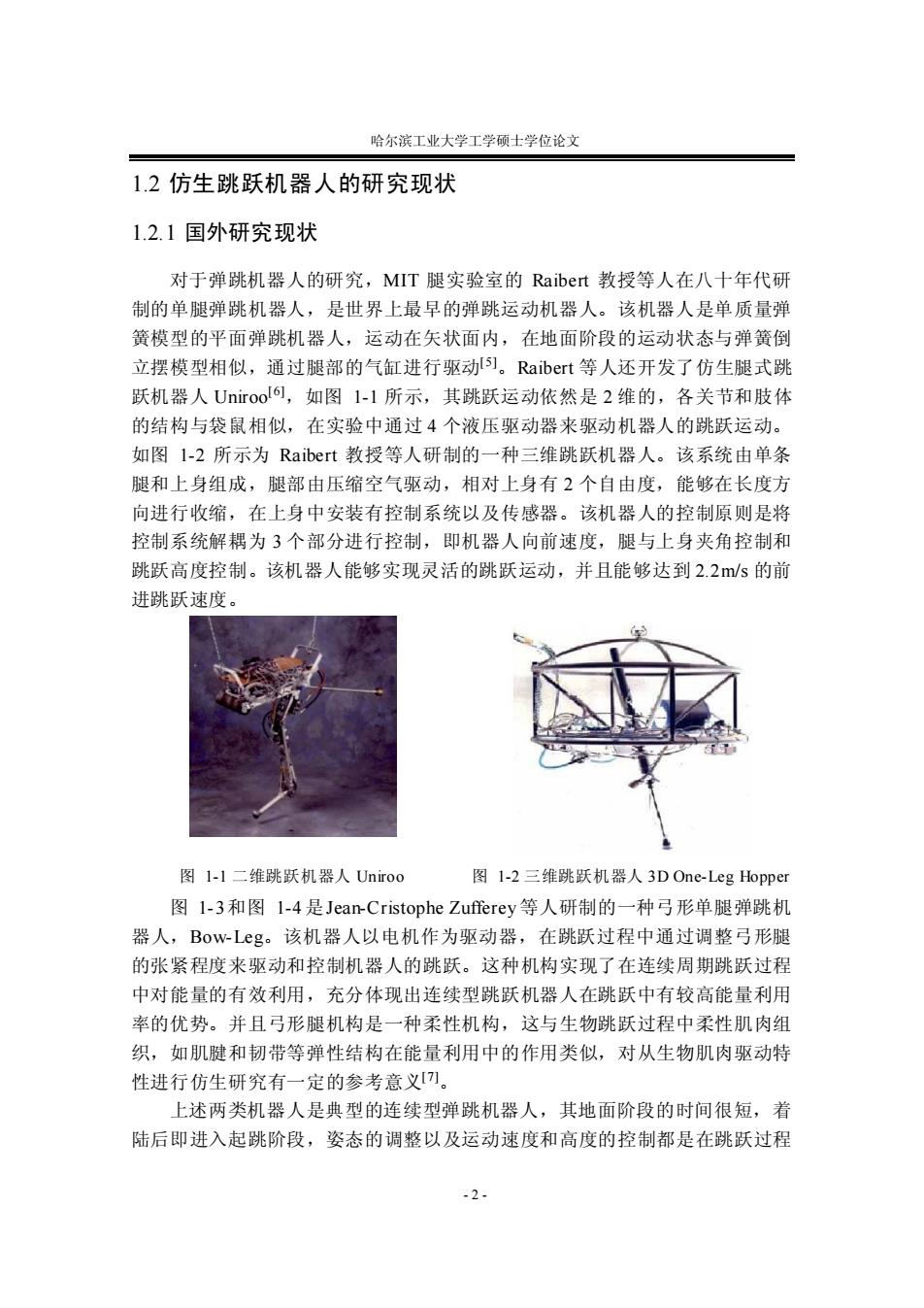
哈尔滨工业大学工学硕士学位论文 1.2仿生跳跃机器人的研究现状 1.2.1国外研究现状 对于弹跳机器人的研究,MIT腿实验室的Raibert教授等人在八十年代研 制的单腿弹跳机器人,是世界上最早的弹跳运动机器人。该机器人是单质量弹 簧模型的平面弹跳机器人,运动在矢状面内,在地面阶段的运动状态与弹簧倒 立摆模型相似,通过腿部的气缸进行驱动s]。Raibert等人还开发了仿生腿式跳 跃机器人Uniroo6,如图1-1所示,其跳跃运动依然是2维的,各关节和肢体 的结构与袋鼠相似,在实验中通过4个液压驱动器来驱动机器人的跳跃运动。 如图1-2所示为Raibert教授等人研制的一种三维跳跃机器人。该系统由单条 腿和上身组成,腿部由压缩空气驱动,相对上身有2个自由度,能够在长度方 向进行收缩,在上身中安装有控制系统以及传感器。该机器人的控制原则是将 控制系统解耦为3个部分进行控制,即机器人向前速度,腿与上身夹角控制和 跳跃高度控制。该机器人能够实现灵活的跳跃运动,并且能够达到2.2/s的前 进跳跃速度。 图1-1二维跳跃机器人Uniroo 图1-2三维跳跃机器人3DOne-Leg Hopper 图1-3和图1-4是Jean-Cristophe Zufferey等人研制的一种弓形单腿弹跳机 器人,Bow-Lg。该机器人以电机作为驱动器,在跳跃过程中通过调整弓形腿 的张紧程度来驱动和控制机器人的跳跃。这种机构实现了在连续周期跳跃过程 中对能量的有效利用,充分体现出连续型跳跃机器人在跳跃中有较高能量利用 率的优势。并且弓形腿机构是一种柔性机构,这与生物跳跃过程中柔性肌肉组 织,如肌腱和韧带等弹性结构在能量利用中的作用类似,对从生物肌肉驱动特 性进行仿生研究有一定的参考意义刀。 上述两类机器人是典型的连续型弹跳机器人,其地面阶段的时间很短,着 陆后即进入起跳阶段,姿态的调整以及运动速度和高度的控制都是在跳跃过程 -2哈尔滨工业大学工学硕士学位论文 - 2 - 1.2 仿生跳跃机器人的研究现状 1.2.1 国外研究现状 对于弹跳机器人的研究,MIT 腿实验室的 Raibert 教授等人在八十年代研 制的单腿弹跳机器人,是世界上最早的弹跳运动机器人。该机器人是单质量弹 簧模型的平面弹跳机器人,运动在矢状面内,在地面阶段的运动状态与弹簧倒 立摆模型相似,通过腿部的气缸进行驱动[5]。Raibert 等人还开发了仿生腿式跳 跃机器人 Uniroo[6],如图 1-1 所示,其跳跃运动依然是 2 维的,各关节和肢体 的结构与袋鼠相似,在实验中通过 4 个液压驱动器来驱动机器人的跳跃运动。 如图 1-2 所示为 Raibert 教授等人研制的一种三维跳跃机器人。该系统由单条 腿和上身组成,腿部由压缩空气驱动,相对上身有 2 个自由度,能够在长度方 向进行收缩,在上身中安装有控制系统以及传感器。该机器人的控制原则是将 控制系统解耦为 3 个部分进行控制,即机器人向前速度,腿与上身夹角控制和 跳跃高度控制。该机器人能够实现灵活的跳跃运动,并且能够达到 2.2m/s 的前 进跳跃速度。 图 1-1 二维跳跃机器人 Uniroo 图 1-2 三维跳跃机器人 3D One-Leg Hopper 图 1-3和图 1-4 是Jean-Cristophe Zufferey等人研制的一种弓形单腿弹跳机 器人,Bow-Leg。该机器人以电机作为驱动器,在跳跃过程中通过调整弓形腿 的张紧程度来驱动和控制机器人的跳跃。这种机构实现了在连续周期跳跃过程 中对能量的有效利用,充分体现出连续型跳跃机器人在跳跃中有较高能量利用 率的优势。并且弓形腿机构是一种柔性机构,这与生物跳跃过程中柔性肌肉组 织,如肌腱和韧带等弹性结构在能量利用中的作用类似,对从生物肌肉驱动特 性进行仿生研究有一定的参考意义[7]。 上述两类机器人是典型的连续型弹跳机器人,其地面阶段的时间很短,着 陆后即进入起跳阶段,姿态的调整以及运动速度和高度的控制都是在跳跃过程