正在加载图片...
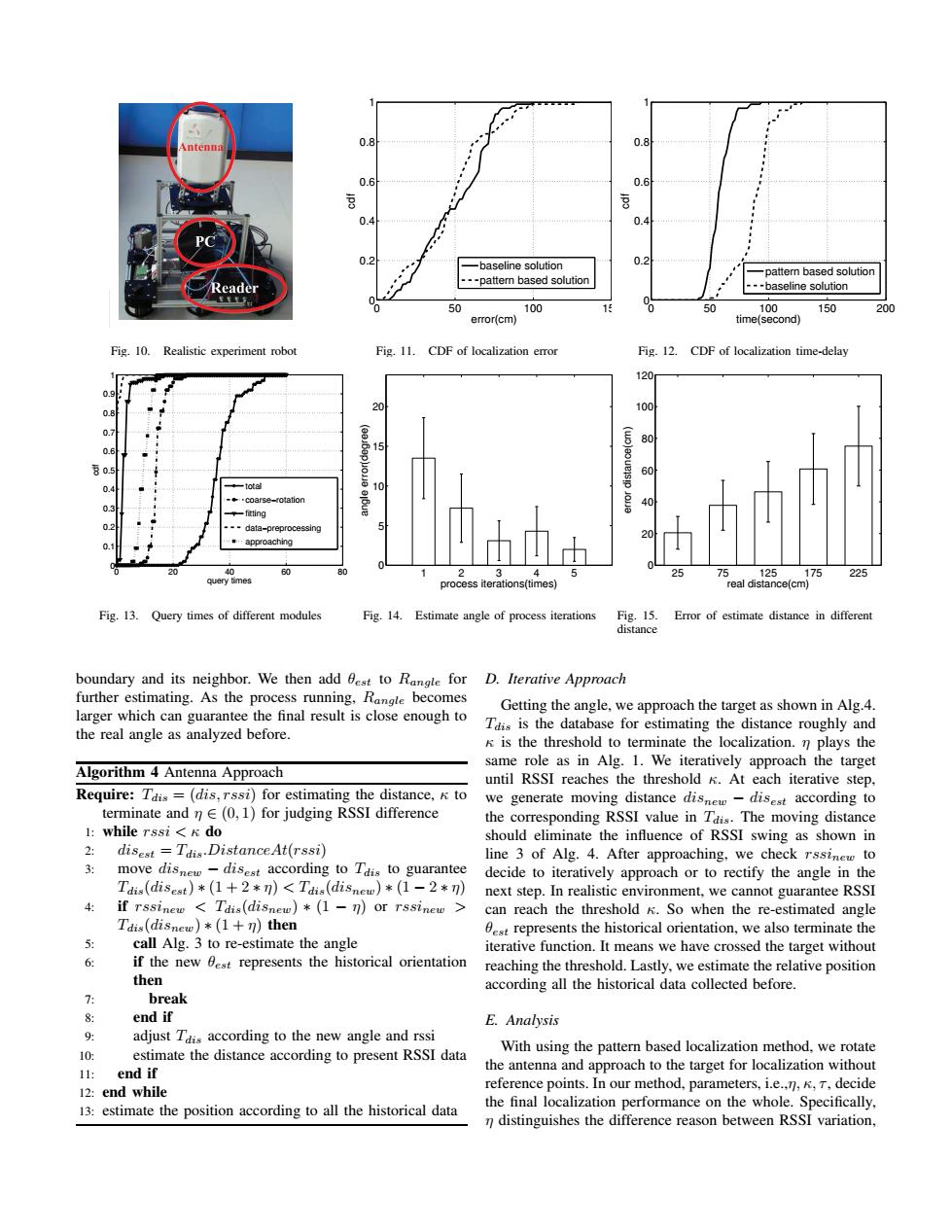
ntenn 0.8 0.8 0.6 0.6 0.4 0.4 0.2 -baseline solution 0.2 -pattern based solution ---pattem based solution Reader ---baseline solution 50 100 0 50 100 150 200 error(cm) time(second) Fig.10.Realistic experiment robot Fig.11.CDF of localization error Fig.12.CDF of localization time-delay 100 0.7 80 0 6 0.4 total coarse-rotation 0.3 -fitting 02 -data-preprocessing 。approaching 40 60 2 25 7 125 175 225 query times process iterations(times) real distance(cm) Fig.13.Query times of different modules Fig.14.Estimate angle of process iterations Fig.15. Error of estimate distance in different distance boundary and its neighbor.We then add best to Rangle for D.Iterative Approach further estimating.As the process running,Rangle becomes larger which can guarantee the final result is close enough to Getting the angle,we approach the target as shown in Alg.4. Tais is the database for estimating the distance roughly and the real angle as analyzed before. Kis the threshold to terminate the localization.n plays the same role as in Alg.1.We iteratively approach the target Algorithm 4 Antenna Approach until RSSI reaches the threshold k.At each iterative step. Require:Tais =(dis,rssi)for estimating the distance,k to we generate moving distance disnew-disest according to terminate and n E(0,1)for judging RSSI difference the corresponding RSSI value in Tais.The moving distance 1:while rssi <k do should eliminate the influence of RSSI swing as shown in 2: disest Tdis.DistanceAt(rssi) line 3 of Alg.4.After approaching,we check rssinew to 3 move disnew-disest according to Tdis to guarantee decide to iteratively approach or to rectify the angle in the Tdis(disest)*(1+2*n)<Tdis(disneu)*(1-2*n) next step.In realistic environment,we cannot guarantee RSSI 4 if rssinew Tdis(disnew)*(1-n)or rssinew can reach the threshold K.So when the re-estimated angle Tdis(disnew)*(1+n)then est represents the historical orientation,we also terminate the 5: call Alg.3 to re-estimate the angle iterative function.It means we have crossed the target without 6: if the new best represents the historical orientation reaching the threshold.Lastly,we estimate the relative position then according all the historical data collected before. 7: break 8: end if E.Analysis adjust Tais according to the new angle and rssi 10: estimate the distance according to present RSSI data With using the pattern based localization method,we rotate 11: end if the antenna and approach to the target for localization without 12:end while reference points.In our method,parameters,i.e.,n,,T,decide 13:estimate the position according to all the historical data the final localization performance on the whole.Specifically, n distinguishes the difference reason between RSSI variation,Fig. 10. Realistic experiment robot 0 50 100 150 0 0.2 0.4 0.6 0.8 1 error(cm) cdf baseline solution pattern based solution Fig. 11. CDF of localization error 0 50 100 150 200 0 0.2 0.4 0.6 0.8 1 time(second) cdf pattern based solution baseline solution Fig. 12. CDF of localization time-delay 0 20 40 60 80 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 query times cdf total coarse−rotation fitting data−preprocessing approaching Fig. 13. Query times of different modules 1 2 3 4 5 0 5 10 15 20 process iterations(times) angle error(degree) Fig. 14. Estimate angle of process iterations 25 75 125 175 225 0 20 40 60 80 100 120 real distance(cm) error distance(cm) Fig. 15. Error of estimate distance in different distance boundary and its neighbor. We then add θest to Rangle for further estimating. As the process running, Rangle becomes larger which can guarantee the final result is close enough to the real angle as analyzed before. Algorithm 4 Antenna Approach Require: Tdis = (dis, rssi) for estimating the distance, κ to terminate and η ∈ (0, 1) for judging RSSI difference 1: while rssi < κ do 2: disest = Tdis.DistanceAt(rssi) 3: move disnew − disest according to Tdis to guarantee Tdis(disest) ∗ (1 + 2 ∗ η) < Tdis(disnew) ∗ (1 − 2 ∗ η) 4: if rssinew < Tdis(disnew) ∗ (1 − η) or rssinew > Tdis(disnew) ∗ (1 + η) then 5: call Alg. 3 to re-estimate the angle 6: if the new θest represents the historical orientation then 7: break 8: end if 9: adjust Tdis according to the new angle and rssi 10: estimate the distance according to present RSSI data 11: end if 12: end while 13: estimate the position according to all the historical data D. Iterative Approach Getting the angle, we approach the target as shown in Alg.4. Tdis is the database for estimating the distance roughly and κ is the threshold to terminate the localization. η plays the same role as in Alg. 1. We iteratively approach the target until RSSI reaches the threshold κ. At each iterative step, we generate moving distance disnew − disest according to the corresponding RSSI value in Tdis. The moving distance should eliminate the influence of RSSI swing as shown in line 3 of Alg. 4. After approaching, we check rssinew to decide to iteratively approach or to rectify the angle in the next step. In realistic environment, we cannot guarantee RSSI can reach the threshold κ. So when the re-estimated angle θest represents the historical orientation, we also terminate the iterative function. It means we have crossed the target without reaching the threshold. Lastly, we estimate the relative position according all the historical data collected before. E. Analysis With using the pattern based localization method, we rotate the antenna and approach to the target for localization without reference points. In our method, parameters, i.e.,η, κ, τ, decide the final localization performance on the whole. Specifically, η distinguishes the difference reason between RSSI variation