正在加载图片...
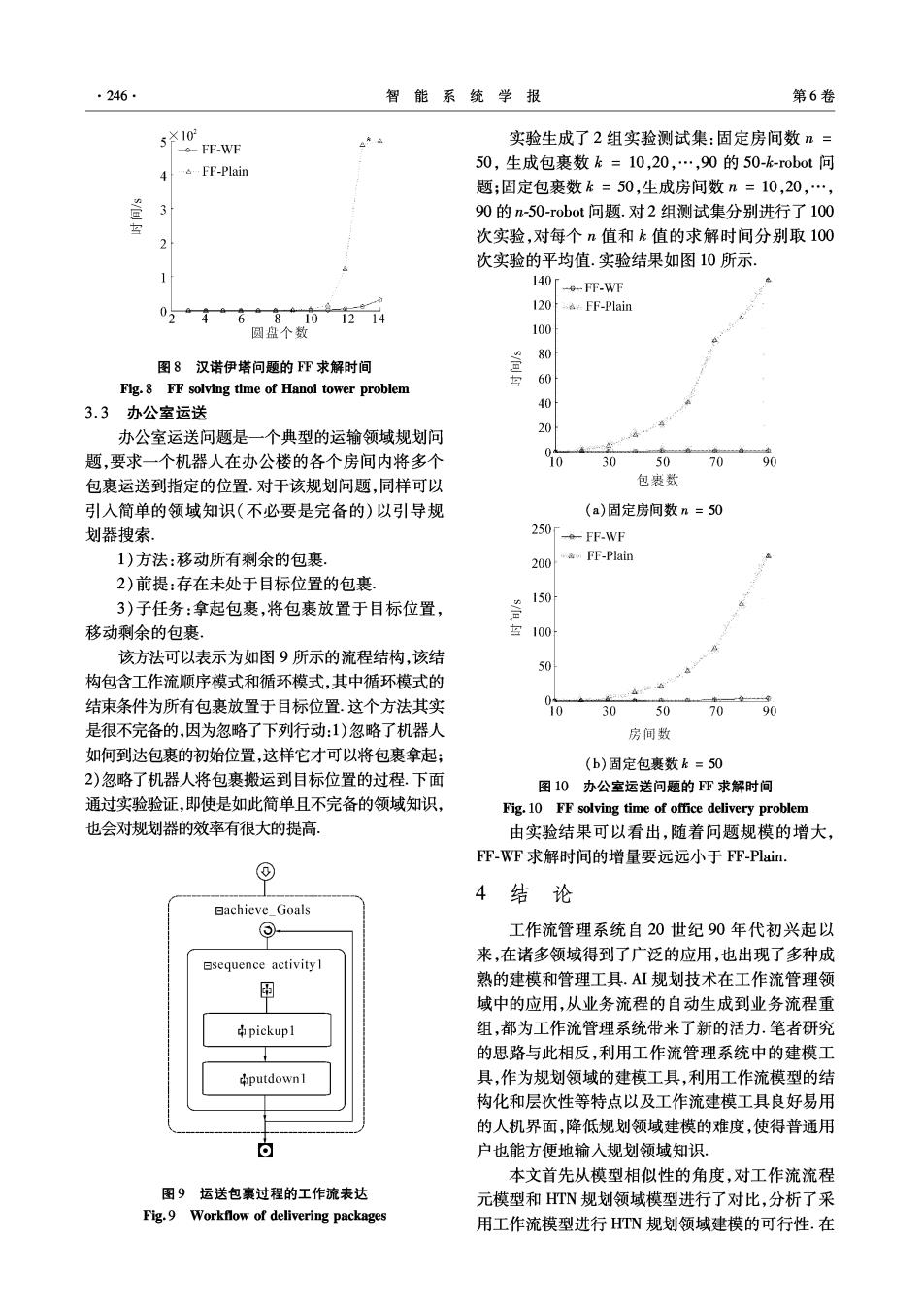
.246. 智能系统学报 第6卷 5六10 实验生成了2组实验测试集:固定房间数n= --FF-WF 4FF-Plain 50,生成包裹数k=10,20,…,90的50-k-robot问 题;固定包裹数k=50,生成房间数n=10,20,…, 3 90的n-50-robot问题.对2组测试集分别进行了100 安 2 次实验,对每个n值和k值的求解时间分别取100 次实验的平均值.实验结果如图10所示. 140[。-F-WF 0246809-24 120 FF-Plain 圆盘个数 100 80 图8汉诺伊塔问题的℉求解时间 60 Fig.8 FF solving time of Hanoi tower problem 3.3办公室运送 40 20 办公室运送问题是一个典型的运输领域规划问 题,要求一个机器人在办公楼的各个房间内将多个 10 30 50 70 90 包裹运送到指定的位置.对于该规划问题,同样可以 包裘数 引入简单的领域知识(不必要是完备的)以引导规 (a)固定房间数n=50 划器搜索 250「-。-FF-WF 1)方法:移动所有剩余的包裹。 200 FF-Plain 2)前提:存在未处于目标位置的包裹。 150 3)子任务:拿起包裹,将包裹放置于目标位置, g 移动剩余的包裹. 安100 该方法可以表示为如图9所示的流程结构,该结 50 构包含工作流顺序模式和循环模式,其中循环模式的 结束条件为所有包裹放置于目标位置.这个方法其实 0 论4 10 3050 70¥ 90 是很不完备的,因为忽略了下列行动:1)忽略了机器人 房间数 如何到达包裹的初始位置,这样它才可以将包裹拿起; (b)固定包裹数k=50 2)忽略了机器人将包裹搬运到目标位置的过程.下面 图10办公室运送问题的F℉求解时间 通过实验验证,即使是如此简单且不完备的领域知识, Fig.10 FF solving time of office delivery problem 也会对规划器的效率有很大的提高。 由实验结果可以看出,随着问题规模的增大, FF-WF求解时间的增量要远远小于FF-Plain. ⊙ 4结论 ▣achieve_Goals 工作流管理系统自20世纪90年代初兴起以 来,在诸多领域得到了广泛的应用,也出现了多种成 Esequence activityl 图 熟的建模和管理工具.AI规划技术在工作流管理领 域中的应用,从业务流程的自动生成到业务流程重 中pickup1 组,都为工作流管理系统带来了新的活力.笔者研究 的思路与此相反,利用工作流管理系统中的建模工 putdownI 具,作为规划领域的建模工具,利用工作流模型的结 构化和层次性等特点以及工作流建模工具良好易用 的人机界面,降低规划领域建模的难度,使得普通用 户也能方便地输入规划领域知识 本文首先从模型相似性的角度,对工作流流程 图9运送包裹过程的工作流表达 元模型和HTN规划领域模型进行了对比,分析了采 Fig.9 Workflow of delivering packages 用工作流模型进行HTN规划领域建模的可行性.在