正在加载图片...
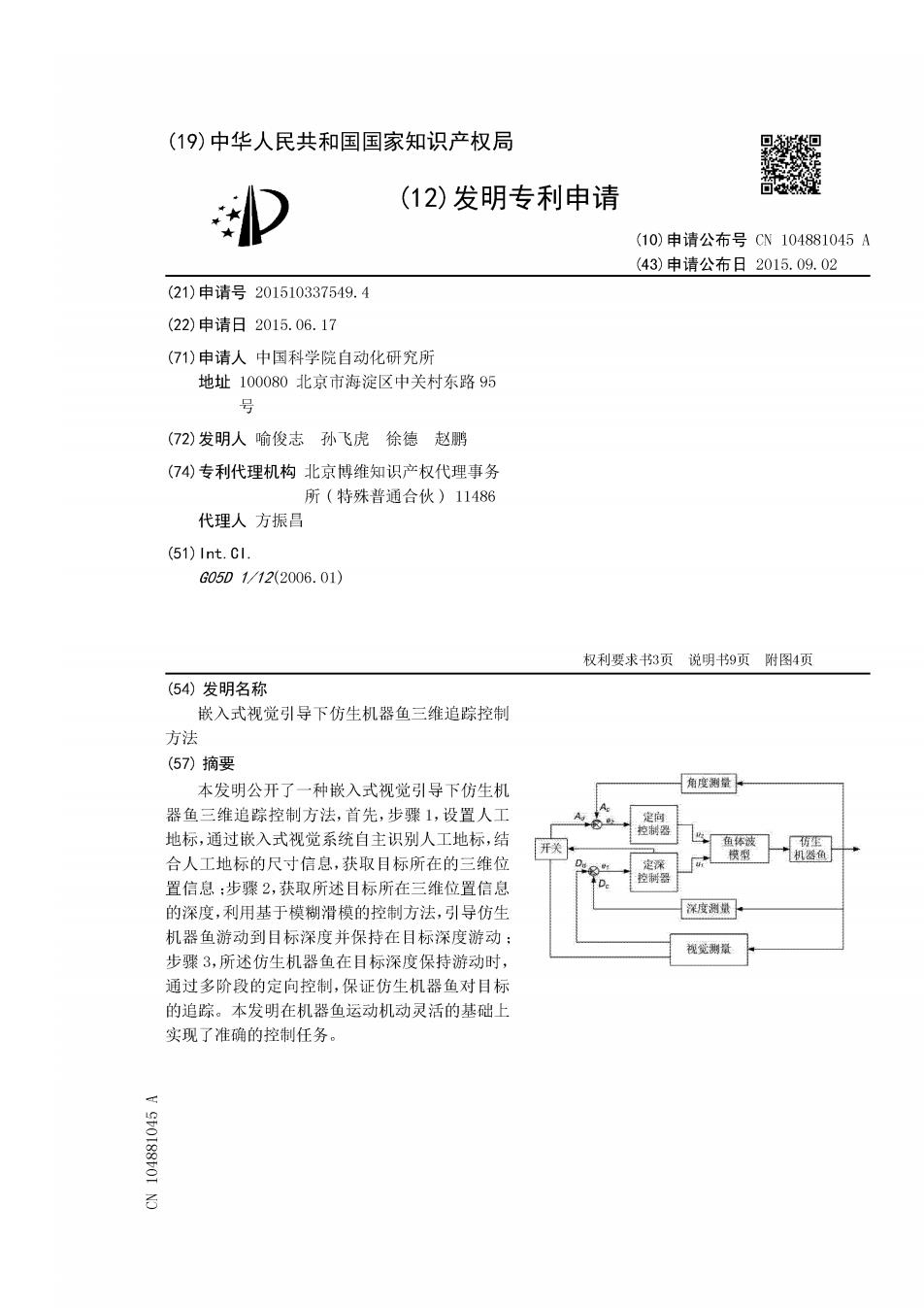
(19)中华人民共和国国家知识产权局 (12)发明专利申请 ▣ (10)申请公布号CN104881045A (43)申请公布日2015.09.02 (21)申请号201510337549.4 (22)申请日2015.06.17 (71)申请人中国科学院自动化研究所 地址100080北京市海淀区中关村东路95 勿 (72)发明人喻俊志孙飞虎徐德赵鹏 (74)专利代理机构北京博维知识产权代理事务 所(特殊普通合伙)11486 代理人方振昌 (51)nt.Cl. 605D1/12(2006.01) 权利要求书3页说明书9页附图4页 (54)发明名称 嵌入式视觉引导下仿生机器鱼三维追踪控制 方法 (57)摘要 本发明公开了一种嵌入式视觉引导下仿生机 角度测量 器鱼三维追踪控制方法,首先,步骤1,设置人工 定向 控制器 地标,通过嵌入式视觉系统自主识别人工地标,结 佰高被 开关 合人工地标的尺寸信息,获取目标所在的三维位 模 定深 控制器 置信息:步骤2,获取所述目标所在三维位置信息 的深度,利用基于模糊滑模的控制方法,引导仿生 深度量 机器鱼游动到目标深度并保持在目标深度游动: 视觉翡最 步骤3,所述仿生机器鱼在目标深度保持游动时, 通过多阶段的定向控制,保证仿生机器鱼对目标 的追踪。本发明在机器鱼运动机动灵活的基础上 实现了准确的控制任务。 S50188501