正在加载图片...
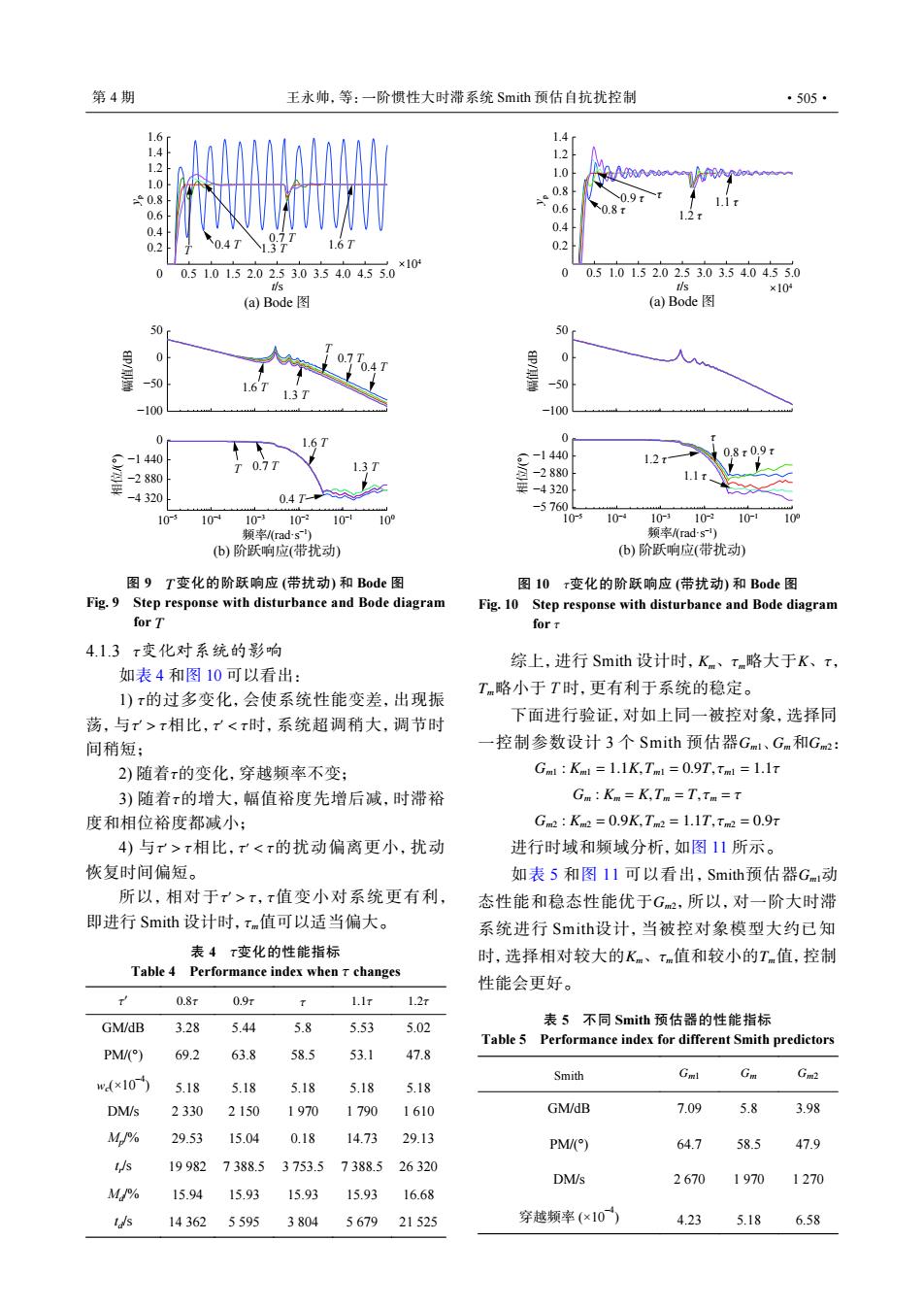
第4期 王永帅,等:一阶惯性大时滞系统Smith预估自抗扰控制 ·505· 1.6 1.4 1.2 1.2 1.0 1.0 0.8 0.8 0.9t 0.6 0.6 0.8t 0.4 0.4 0.2 04 1.67 0.2 0 051.0152.0253.035404550*10 0 0.51.01.52.02.53.03.54.04.55.0 t/s ×109 (a)Bode图 (a)Bode图 50 50 0 0.4 50 -50 -100 -100 0 -1440 0.71 C-1440 1.2r 0.8x0.9t -2880 -2880 要-4320 -4320 0.4T -5760 10 10N 103 10210 109 0 104 10-310-210 10 频率(rads) 频率(rads) (b)阶跃响应(带扰动) (b)阶跃响应(带扰动) 图9T变化的阶跃响应(带扰动)和Bode图 图10r变化的阶跃响应(带扰动)和Bode图 Fig.9 Step response with disturbance and Bode diagram Fig.10 Step response with disturbance and Bode diagram for T for t 4.1.3r变化对系统的影响 综上,进行Smith设计时,Km、tm略大于K、t, 如表4和图10可以看出: 1)τ的过多变化,会使系统性能变差,出现振 Tm略小于T时,更有利于系统的稳定。 荡,与t>t相比,<r时,系统超调稍大,调节时 下面进行验证,对如上同一被控对象,选择同 间稍短; 控制参数设计3个Smith预估器Gm1、Gm和Gm2: 2)随着x的变化,穿越频率不变; Gml Kml =1.1K,Tm =0.9T,TmI =1.1T 3)随着τ的增大,幅值裕度先增后减,时滞裕 Gm:Km=K,Tm=T,Tm=T 度和相位裕度都减小; Gm:Kn2=0.9K,Tm2=1.1T,tm2=0.9r 4)与t>r相比,x<r的扰动偏离更小,扰动 进行时域和频域分析,如图11所示。 恢复时间偏短。 如表5和图11可以看出,Smith预估器Gm,动 所以,相对于>T,τ值变小对系统更有利, 态性能和稳态性能优于Gm2,所以,对一阶大时滞 即进行Smith设计时,tm值可以适当偏大。 系统进行Smith设计,当被控对象模型大约已知 表4t变化的性能指标 时,选择相对较大的Km、Tm值和较小的Tm值,控制 Table 4 Performance index when t changes 性能会更好。 0.8t 0.9r 1.1r 1.2r GM/dB 3.28 5.44 5.8 5.53 5.02 表5不同Smith预估器的性能指标 Table 5 Performance index for different Smith predictors PM/) 69.2 63.8 58.5 53.1 47.8 w.(×10 Smith Gml Gm Gm2 5.18 5.18 5.18 5.18 5.18 DM/s 2330 2150 1970 1790 1610 GM/dB 7.09 5.8 3.98 M/% 29.53 15.04 0.18 14.73 29.13 PM/() 64.7 58.5 47.9 t/s 19982 7388.5 3753.5 7388.526320 DM/s 2670 1970 1270 M/% 15.94 15.93 15.93 15.93 16.68 ts 14362 5595 3804 5679 21525 穿越频率(×10 4.23 5.18 6.58−100 −50 0 50 幅值/dB −4 320 −2 880 −1 440 0 频率/(rad·s−1) 0.7 T 10−5 10−4 10−3 10−2 10−1 100 相位/(°) (b) 阶跃响应(带扰动) 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 (a) Bode 图 yp ×104 t/s T 0.4 T 0.7 T 1.3 T 1.3 T 1.6 T T 1.6 T 0.4 T 0.4 T 0.7 T 1.3 T 1.6 T T 图 9 T 变化的阶跃响应 (带扰动) 和 Bode 图 T Fig. 9 Step response with disturbance and Bode diagram for 4.1.3 τ变化对系统的影响 如表 4 和图 10 可以看出: τ τ ′ > τ τ ′ < τ 1) 的过多变化,会使系统性能变差,出现振 荡,与 相比, 时,系统超调稍大,调节时 间稍短; 2) 随着τ的变化,穿越频率不变; 3) 随着τ的增大,幅值裕度先增后减,时滞裕 度和相位裕度都减小; τ ′ > τ τ ′ 4) 与 相比, < τ 的扰动偏离更小,扰动 恢复时间偏短。 τ ′ > τ τ τm 所以,相对于 , 值变小对系统更有利, 即进行 Smith 设计时, 值可以适当偏大。 表 4 τ变化的性能指标 Table 4 Performance index when τ changes τ ′ 0.8τ 0.9τ τ 1.1τ 1.2τ GM/dB 3.28 5.44 5.8 5.53 5.02 PM/(°) 69.2 63.8 58.5 53.1 47.8 wc(×10–4) 5.18 5.18 5.18 5.18 5.18 DM/s 2 330 2 150 1 970 1 790 1 610 Mp /% 29.53 15.04 0.18 14.73 29.13 tr /s 19 982 7 388.5 3 753.5 7 388.5 26 320 Md /% 15.94 15.93 15.93 15.93 16.68 td /s 14 362 5 595 3 804 5 679 21 525 −100 −50 0 50 −5 760 −4 320 −2 880 −1 440 0 频率/(rad·s−1) 0.8 τ 0.9 τ 1.1 τ 1.2 τ τ 10−5 10−4 10−3 10−2 10−1 100 幅值/dB 相位/(°) (b) 阶跃响应(带扰动) 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 (a) Bode 图 t/s ×104 0.8 τ 0.9 τ 1.1 τ 1.2 τ τ yp 图 10 τ变化的阶跃响应 (带扰动) 和 Bode 图 τ Fig. 10 Step response with disturbance and Bode diagram for Km、τm K、τ Tm 综上,进行 Smith 设计时, 略大于 , 略小于 T 时,更有利于系统的稳定。 Gm1 Gm Gm2 下面进行验证,对如上同一被控对象,选择同 一控制参数设计 3 个 Smith 预估器 、 和 : Gm1 : Km1 = 1.1K,Tm1 = 0.9T,τm1 = 1.1τ Gm : Km = K,Tm = T,τm = τ Gm2 : Km2 = 0.9K,Tm2 = 1.1T,τm2 = 0.9τ 进行时域和频域分析,如图 11 所示。 Smith Gm1 Gm2 Km、τm Tm 如表 5 和图 11 可以看出, 预估器 动 态性能和稳态性能优于 ,所以,对一阶大时滞 系统进行 Smith设计,当被控对象模型大约已知 时,选择相对较大的 值和较小的 值,控制 性能会更好。 表 5 不同 Smith 预估器的性能指标 Table 5 Performance index for different Smith predictors Smith Gm1 Gm Gm2 GM/dB 7.09 5.8 3.98 PM/(°) 64.7 58.5 47.9 DM/s 2 670 1 970 1 270 穿越频率 (×10–4) 4.23 5.18 6.58 第 4 期 王永帅,等:一阶惯性大时滞系统 Smith 预估自抗扰控制 ·505·