正在加载图片...
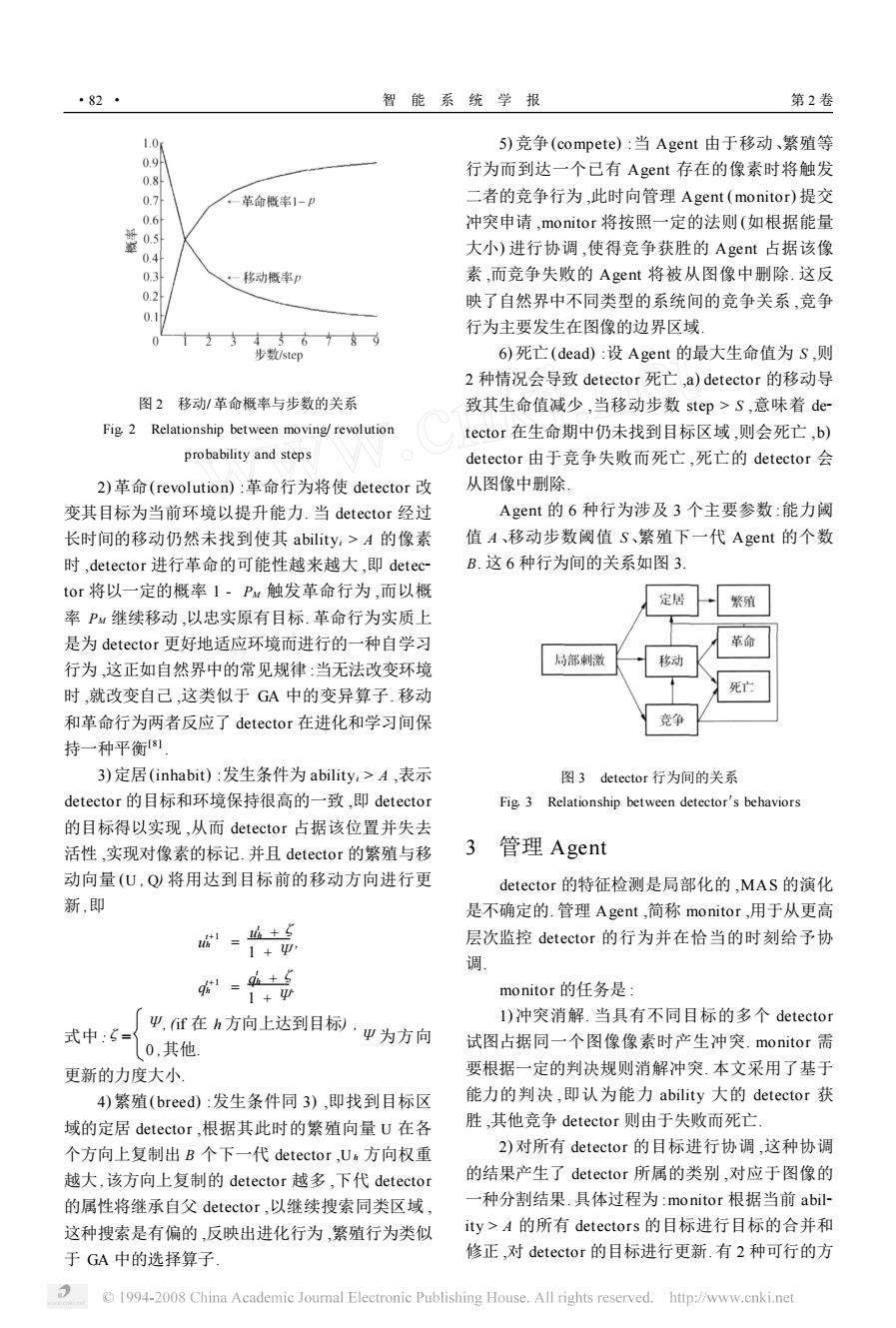
·82 智能系统学报 第2卷 1.0e 5)竞争(compete):当Agent由于移动、繁殖等 0.9 行为而到达一个已有Agent存在的像素时将触发 0.8 0.7 一革命概率1-P 二者的竞争行为,此时向管理Agent(monitor)提交 0.6 冲突申请,monitor将按照一定的法则(如根据能量 蓝 0.4 大小)进行协调,使得竞争获胜的Agent占据该像 0.3 ·一移动概率卫 素,而竞争失败的Agent将被从图像中删除.这反 0.2 映了自然界中不同类型的系统间的竞争关系,竞争 行为主要发生在图像的边界区域 0 十3寸5689 步数/step 6)死亡(dead):设Agent的最大生命值为S,则 2种情况会导致detector死亡,a)detector的移动导 图2移动/革命概率与步数的关系 致其生命值减少,当移动步数step>S,意味着de Fig 2 Relationship between moving/revolution tector在生命期中仍未找到目标区域,则会死亡,b) probability and steps detector由于竞争失败而死亡,死亡的detector会 2)革命(revolution):革命行为将使detector改 从图像中删除。 变其目标为当前环境以提升能力.当detector经过 Agent的6种行为涉及3个主要参数:能力阈 长时间的移动仍然未找到使其ability,>A的像素 值A、移动步数阈值S、繁殖下一代Aget的个数 时,detector进行革命的可能性越来越大,即detec- B.这6种行为间的关系如图3 tor将以一定的概率1-P触发革命行为,而以概 定居 繁殖 率P,继续移动,以忠实原有目标.革命行为实质上 是为detector更好地适应环境而进行的一种自学习 革命 行为,这正如自然界中的常见规律:当无法改变环境 局部刺激 移动 时,就改变自己,这类似于GA中的变异算子.移动 死亡 和革命行为两者反应了detector在进化和学习间保 竞争 持一种平衡 3)定居(inhabit):发生条件为ability,>A,表示 图3 detector行为间的关系 detector的目标和环境保持很高的一致,即detector Fig 3 Relationship between detector's behaviors 的目标得以实现,从而detector占据该位置并失去 活性,实现对像素的标记.并且detector的繁殖与移 3 管理Agent 动向量(U,Q将用达到目标前的移动方向进行更 detector的特征检测是局部化的,MAS的演化 新,即 是不确定的.管理Agent,简称monitor,用于从更高 1=近土5 层次监控detector的行为并在恰当的时刻给予协 1+Ψ 调 =96±5 1+Ψ monitor的任务是: 平,任在h方向上达到目标,平为方向 I)冲突消解.当具有不同目标的多个detector 式中:5= 0,其他 试图占据同一个图像像素时产生冲突.monitor需 更新的力度大小 要根据一定的判决规则消解冲突.本文采用了基于 4)繁殖(breed):发生条件同3),即找到目标区 能力的判决,即认为能力ability大的detector获 域的定居detector,根据其此时的繁殖向量U在各 胜,其他竞争detector则由于失败而死亡. 个方向上复制出B个下一代detector,U方向权重 2)对所有detector的目标进行协调,这种协调 越大,该方向上复制的detector越多,下代detector 的结果产生了detector所属的类别,对应于图像的 的属性将继承自父detector,以继续搜索同类区域, 一种分割结果.具体过程为:monitor根据当前abil- 这种搜索是有偏的,反映出进化行为,繁殖行为类似 ity>A的所有detectors的目标进行目标的合并和 于GA中的选择算子 修正,对detector的目标进行更新.有2种可行的方 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net图 2 移动/ 革命概率与步数的关系 Fig12 Relationship between moving/ revolution probability and step s 2) 革命(revolution) :革命行为将使 detector 改 变其目标为当前环境以提升能力. 当 detector 经过 长时间的移动仍然未找到使其 abilityi > A 的像素 时 ,detector 进行革命的可能性越来越大 ,即 detec2 tor 将以一定的概率 1 - PM 触发革命行为 ,而以概 率 PM 继续移动 ,以忠实原有目标. 革命行为实质上 是为 detector 更好地适应环境而进行的一种自学习 行为 ,这正如自然界中的常见规律 :当无法改变环境 时 ,就改变自己 ,这类似于 GA 中的变异算子. 移动 和革命行为两者反应了 detector 在进化和学习间保 持一种平衡[8 ] . 3) 定居(inhabit) :发生条件为 abilityi > A ,表示 detector 的目标和环境保持很高的一致 ,即 detector 的目标得以实现 ,从而 detector 占据该位置并失去 活性 ,实现对像素的标记. 并且 detector 的繁殖与移 动向量 (U , Q) 将用达到目标前的移动方向进行更 新 ,即 u t+1 h = u t h +ζ 1 + Ψ , q t+1 h = q t h +ζ 1 + Ψ . 式中 :ζ= Ψ, (if 在 h 方向上达到目标) , 0 ,其他. Ψ 为方向 更新的力度大小. 4) 繁殖(breed) :发生条件同 3) ,即找到目标区 域的定居 detector ,根据其此时的繁殖向量 U 在各 个方向上复制出 B 个下一代 detector ,Uh 方向权重 越大 ,该方向上复制的 detector 越多 ,下代 detector 的属性将继承自父 detector ,以继续搜索同类区域 , 这种搜索是有偏的 ,反映出进化行为 ,繁殖行为类似 于 GA 中的选择算子. 5) 竞争(compete) :当 Agent 由于移动、繁殖等 行为而到达一个已有 Agent 存在的像素时将触发 二者的竞争行为 ,此时向管理 Agent (monitor) 提交 冲突申请 ,monitor 将按照一定的法则(如根据能量 大小) 进行协调 ,使得竞争获胜的 Agent 占据该像 素 ,而竞争失败的 Agent 将被从图像中删除. 这反 映了自然界中不同类型的系统间的竞争关系 ,竞争 行为主要发生在图像的边界区域. 6) 死亡(dead) :设 Agent 的最大生命值为 S ,则 2 种情况会导致 detector 死亡 ,a) detector 的移动导 致其生命值减少 ,当移动步数 step > S ,意味着 de2 tector 在生命期中仍未找到目标区域 ,则会死亡 ,b) detector 由于竞争失败而死亡 ,死亡的 detector 会 从图像中删除. Agent 的 6 种行为涉及 3 个主要参数 :能力阈 值 A 、移动步数阈值 S 、繁殖下一代 Agent 的个数 B. 这 6 种行为间的关系如图 3. 图 3 detector 行为间的关系 Fig13 Relationship between detector′s behaviors 3 管理 Agent detector 的特征检测是局部化的 ,MAS 的演化 是不确定的. 管理 Agent ,简称 monitor ,用于从更高 层次监控 detector 的行为并在恰当的时刻给予协 调. monitor 的任务是 : 1) 冲突消解. 当具有不同目标的多个 detector 试图占据同一个图像像素时产生冲突. monitor 需 要根据一定的判决规则消解冲突. 本文采用了基于 能力的判决 ,即认为能力 ability 大的 detector 获 胜 ,其他竞争 detector 则由于失败而死亡. 2) 对所有 detector 的目标进行协调 ,这种协调 的结果产生了 detector 所属的类别 ,对应于图像的 一种分割结果. 具体过程为 :monitor 根据当前 abil2 ity > A 的所有 detectors 的目标进行目标的合并和 修正 ,对 detector 的目标进行更新. 有 2 种可行的方 · 28 · 智 能 系 统 学 报 第 2 卷