正在加载图片...
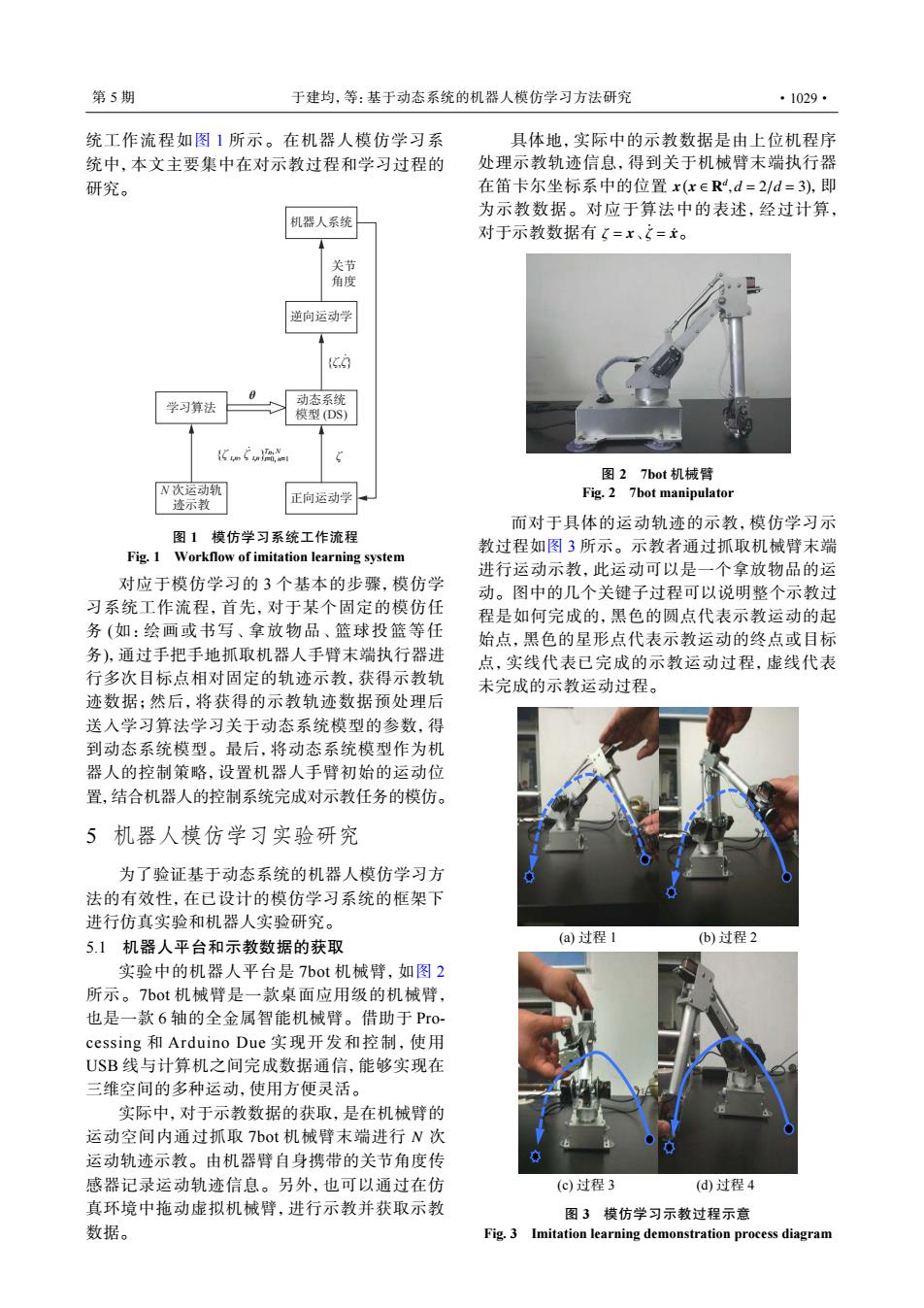
第5期 于建均,等:基于动态系统的机器人模仿学习方法研究 ·1029· 统工作流程如图1所示。在机器人模仿学习系 具体地,实际中的示教数据是由上位机程序 统中,本文主要集中在对示教过程和学习过程的 处理示教轨迹信息,得到关于机械臂末端执行器 研究。 在笛卡尔坐标系中的位置x(xeR,d=2/d=3),即 为示教数据。对应于算法中的表述,经过计算, 机器人系统 对于示教数据有(=x、=。 关节 角度 逆向运动学 IO 学习算法 动态系统 模型DS) 图27bot机械臂 N次运动轨 正向运动学 Fig.2 7bot manipulator 迹示教 而对于具体的运动轨迹的示教,模仿学习示 图1模仿学习系统工作流程 教过程如图3所示。示教者通过抓取机械臂末端 Fig.1 Workflow of imitation learning system 进行运动示教,此运动可以是一个拿放物品的运 对应于模仿学习的3个基本的步骤,模仿学 动。图中的几个关键子过程可以说明整个示教过 习系统工作流程,首先,对于某个固定的模仿任 程是如何完成的,黑色的圆点代表示教运动的起 务(如:绘画或书写、拿放物品、篮球投篮等任 始点,黑色的星形点代表示教运动的终点或目标 务),通过手把手地抓取机器人手臂末端执行器进 点,实线代表已完成的示教运动过程,虚线代表 行多次目标点相对固定的轨迹示教,获得示教轨 未完成的示教运动过程。 迹数据;然后,将获得的示教轨迹数据预处理后 送入学习算法学习关于动态系统模型的参数,得 到动态系统模型。最后,将动态系统模型作为机 器人的控制策略,设置机器人手臂初始的运动位 置,结合机器人的控制系统完成对示教任务的模仿。 5机器人模仿学习实验研究 为了验证基于动态系统的机器人模仿学习方 法的有效性,在已设计的模仿学习系统的框架下 进行仿真实验和机器人实验研究。 (a)过程1 (b)过程2 5.1机器人平台和示教数据的获取 实验中的机器人平台是7bot机械臂,如图2 所示。7bot机械臂是一款桌面应用级的机械臂, 也是一款6轴的全金属智能机械臂。借助于Pro cessing和Arduino Due实现开发和控制,使用 USB线与计算机之间完成数据通信,能够实现在 三维空间的多种运动,使用方便灵活。 实际中,对于示教数据的获取,是在机械臂的 运动空间内通过抓取7bot机械臂末端进行N次 运动轨迹示教。由机器臂自身携带的关节角度传 感器记录运动轨迹信息。另外,也可以通过在仿 (c)过程3 (d过程4 真环境中拖动虚拟机械臂,进行示教并获取示教 图3模仿学习示教过程示意 数据。 Fig.3 Imitation learning demonstration process diagram统工作流程如图 1 所示。在机器人模仿学习系 统中,本文主要集中在对示教过程和学习过程的 研究。 逆向运动学 正向运动学 N 次运动轨 迹示教 学习算法 动态系统 模型 (DS) 机器人系统 关节 角度 {ζ,ζ} . {ζ t,n , ζ t,n} . Tn, N t=0, n=1 ζ θ 图 1 模仿学习系统工作流程 Fig. 1 Workflow of imitation learning system 对应于模仿学习的 3 个基本的步骤,模仿学 习系统工作流程,首先,对于某个固定的模仿任 务 (如:绘画或书写、拿放物品、篮球投篮等任 务),通过手把手地抓取机器人手臂末端执行器进 行多次目标点相对固定的轨迹示教,获得示教轨 迹数据;然后,将获得的示教轨迹数据预处理后 送入学习算法学习关于动态系统模型的参数,得 到动态系统模型。最后,将动态系统模型作为机 器人的控制策略,设置机器人手臂初始的运动位 置,结合机器人的控制系统完成对示教任务的模仿。 5 机器人模仿学习实验研究 为了验证基于动态系统的机器人模仿学习方 法的有效性,在已设计的模仿学习系统的框架下 进行仿真实验和机器人实验研究。 5.1 机器人平台和示教数据的获取 实验中的机器人平台是 7bot 机械臂,如图 2 所示。7bot 机械臂是一款桌面应用级的机械臂, 也是一款 6 轴的全金属智能机械臂。借助于 Processing 和 Arduino Due 实现开发和控制,使用 USB 线与计算机之间完成数据通信,能够实现在 三维空间的多种运动,使用方便灵活。 N 实际中,对于示教数据的获取,是在机械臂的 运动空间内通过抓取 7bot 机械臂末端进行 次 运动轨迹示教。由机器臂自身携带的关节角度传 感器记录运动轨迹信息。另外,也可以通过在仿 真环境中拖动虚拟机械臂,进行示教并获取示教 数据。 x ( x ∈ R d ,d = 2/d = 3 ) ζ = x ζ˙ = x˙ 具体地,实际中的示教数据是由上位机程序 处理示教轨迹信息,得到关于机械臂末端执行器 在笛卡尔坐标系中的位置 ,即 为示教数据。对应于算法中的表述,经过计算, 对于示教数据有 、 。 图 2 7bot 机械臂 Fig. 2 7bot manipulator 而对于具体的运动轨迹的示教,模仿学习示 教过程如图 3 所示。示教者通过抓取机械臂末端 进行运动示教,此运动可以是一个拿放物品的运 动。图中的几个关键子过程可以说明整个示教过 程是如何完成的,黑色的圆点代表示教运动的起 始点,黑色的星形点代表示教运动的终点或目标 点,实线代表已完成的示教运动过程,虚线代表 未完成的示教运动过程。 (a) 过程 1 (b) 过程 2 (c) 过程 3 (d) 过程 4 图 3 模仿学习示教过程示意 Fig. 3 Imitation learning demonstration process diagram 第 5 期 于建均,等:基于动态系统的机器人模仿学习方法研究 ·1029·