正在加载图片...
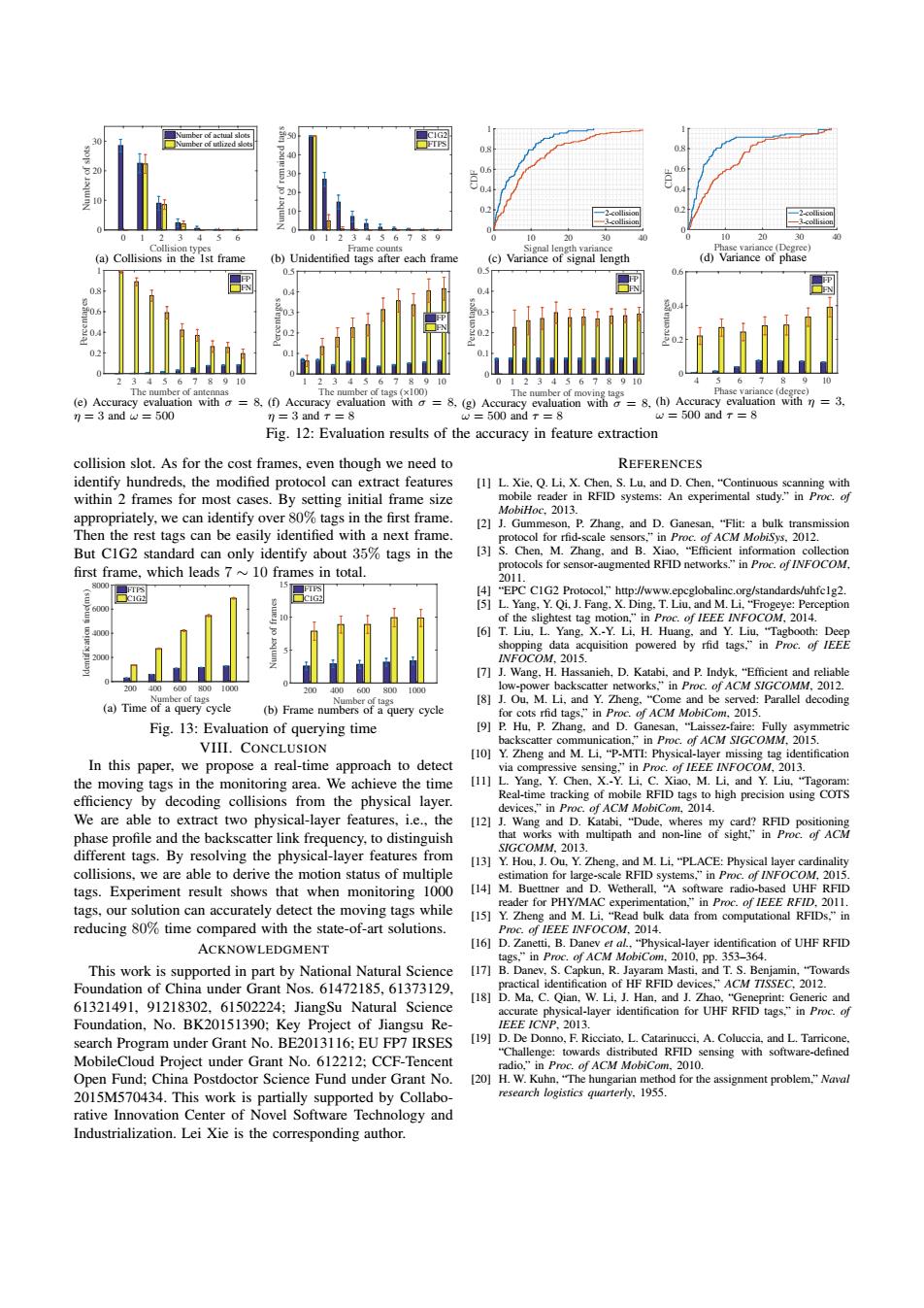
0.6 .0.6 03 02 789 30 (a)Collisions in the Ist frame (b)Unidentified tags after each frame (c)Variance of signal length (d)Variance of phase 05 18 01 The numbe rof an The number of tags (x100) The number of moving tags (e)Accuracy evaluation with a =8.(f)Accuracy evaluation with o =8,(g)Accuracy evaluation with o =8.(h)Accuracy evaluation w n=3 andw =500 n=3 andT =8 w =500 andT =8 w=500 and T=8 Fig.12:Evaluation results of the accuracy in feature extraction collision slot.As for the cost frames,even though we need to REFERENCES identify hundreds,the modified protocol can extract features [1]L.Xie,Q.Li,X.Chen,S.Lu,and D.Chen,"Continuous scanning with within 2 frames for most cases.By setting initial frame size mobile reader in RFID systems:An experimental study."in Proc.of appropriately,we can identify over 80%tags in the first frame. MobiHoc,2013. [2]J.Gummeson,P.Zhang,and D.Ganesan,"Flit:a bulk transmission Then the rest tags can be easily identified with a next frame. protocol for rfid-scale sensors."in Proc.ofACM MobiSys.2012. But C1G2 standard can only identify about 35%tags in the [3]S.Chen,M.Zhang,and B.Xiao."Efficient information collection first frame,which leads 7~10 frames in total. protocols for sensor-augmented RFID networks."in Proc.ofINFOCOM. 2011 [4]"EPC CIG2 Protocol,http://www.epcglobalinc.org/standards/uhfc1g2. [5]L.Yang,Y.Qi.J.Fang.X.Ding.T.Liu,and M.Li,"Frogeye:Perception of the slightest tag motion,"in Proc.of IEEE INFOCOM,2014. [6]T.Liu,L.Yang.X.-Y.Li.H.Huang.and Y.Liu,"Tagbooth:Deep shopping data acquisition powered by rfid tags."in Proc.of IEEE INFOCOM.2015. [7]J.Wang.H.Hassanieh,D.Katabi,and P.Indyk,"Efficient and reliable 2004006008001000 low-power backscatter networks,"in Proc.of ACM SIGCOMM,2012. Number of tao [8]J.Ou,M.Li,and Y.Zheng,"Come and be served:Parallel decoding (a)Time of a query cycle (b)Frame numbers of a query cycle for cots rfid tags,"in Proc.of ACM MobiCom,2015 Fig.13:Evaluation of querying time 9]P.Hu,P.Zhang.and D.Ganesan,"Laissez-faire:Fully asymmetric VIII.CONCLUSION backscatter communication,"in Proc.of ACM S/GCOMM,2015. [10]Y.Zheng and M.Li,"P-MTI:Physical-layer missing tag identification In this paper,we propose a real-time approach to detect via compressive sensing,"in Proc.of IEEE INFOCOM,2013 the moving tags in the monitoring area.We achieve the time [11]L.Yang.Y.Chen,X.-Y.Li,C.Xiao,M.Li.and Y.Liu,"Tagoram: efficiency by decoding collisions from the physical layer. Real-time tracking of mobile RFID tags to high precision using COTS devices,"in Proc.of ACM MobiCom.2014. We are able to extract two physical-layer features,i.e.,the [12]J.Wang and D.Katabi,"Dude,wheres my card?RFID positioning phase profile and the backscatter link frequency,to distinguish that works with multipath and non-line of sight,"in Proc.of ACM SIGCOMM.2013. different tags.By resolving the physical-layer features from [13]Y.Hou,J.Ou,Y.Zheng,and M.Li,"PLACE:Physical layer cardinality collisions,we are able to derive the motion status of multiple estimation for large-scale RFID systems,"in Proc of INFOCOM,2015 tags.Experiment result shows that when monitoring 1000 [14]M.Buettner and D.Wetherall,"A software radio-based UHF RFID tags,our solution can accurately detect the moving tags while reader for PHY/MAC experimentation,"in Proc.of IEEE RFID,2011. [15】Y.Zheng and M.Li,“Read bulk data from computational RFIDs,”in reducing 80%time compared with the state-of-art solutions. Proc.of IEEE INFOCOM.2014. ACKNOWLEDGMENT [16]D.Zanetti,B.Danev er al,"Physical-layer identification of UHF RFID tags."in Proc.of ACM MobiCom,2010,pp.353-364. This work is supported in part by National Natural Science [17]B.Danev,S.Capkun,R.Jayaram Masti,and T.S.Benjamin,"Towards Foundation of China under Grant Nos.61472185,61373129 practical identification of HF RFID devices,"ACM TISSEC,2012. [18]D.Ma,C.Qian,W.Li,J.Han,and J.Zhao,"Geneprint:Generic and 61321491,91218302,61502224;JiangSu Natural Science accurate physical-layer identification for UHF RFID tags."in Proc.f Foundation.No.BK20151390:Key Project of Jiangsu Re- IEEE ICNP,2013. search Program under Grant No.BE2013116;EU FP7 IRSES [19]D.De Donno,F.Ricciato,L.Catarinucci,A.Coluccia,and L.Tarricone "Challenge:towards distributed RFID sensing with software-defined MobileCloud Project under Grant No.612212;CCF-Tencent radio,"in Proc.of ACM MobiCom.2010. Open Fund:China Postdoctor Science Fund under Grant No. [20]H.W.Kuhn,"The hungarian method for the assignment problem,"Naval 2015M570434.This work is partially supported by Collabo- research logistics quarterly.1955. rative Innovation Center of Novel Software Technology and Industrialization.Lei Xie is the corresponding author.Collision types 0123456 Number of slots 0 10 20 30 Number of actual slots Number of utlized slots (a) Collisions in the 1st frame Frame counts 0123456789 Number of remained tags 0 10 20 30 40 50 C1G2 FTPS (b) Unidentified tags after each frame Signal length variance 0 10 20 30 40 CDF 0 0.2 0.4 0.6 0.8 1 2-collision 3-collision (c) Variance of signal length Phase variance (Degree) 0 10 20 30 40 CDF 0 0.2 0.4 0.6 0.8 1 2-collision 3-collision (d) Variance of phase The number of antennas 2 3 4 5 6 7 8 9 10 Percentages 0 0.2 0.4 0.6 0.8 1 FP FN (e) Accuracy evaluation with σ = 8, η = 3 and ω = 500 The number of tags (×100) 1 2 3 4 5 6 7 8 9 10 Percentages 0 0.1 0.2 0.3 0.4 0.5 FP FN (f) Accuracy evaluation with σ = 8, η = 3 and τ = 8 The number of moving tags 0 1 2 3 4 5 6 7 8 9 10 Percentages 0 0.1 0.2 0.3 0.4 0.5 FP FN (g) Accuracy evaluation with σ = 8, ω = 500 and τ = 8 Phase variance (degree) 4 5 6 7 8 9 10 Percentages 0 0.2 0.4 0.6 FP FN (h) Accuracy evaluation with η = 3, ω = 500 and τ = 8 Fig. 12: Evaluation results of the accuracy in feature extraction collision slot. As for the cost frames, even though we need to identify hundreds, the modified protocol can extract features within 2 frames for most cases. By setting initial frame size appropriately, we can identify over 80% tags in the first frame. Then the rest tags can be easily identified with a next frame. But C1G2 standard can only identify about 35% tags in the first frame, which leads 7 ∼ 10 frames in total. Number of tags 200 400 600 800 1000 Identification time(ms) 0 2000 4000 6000 8000 FTPS C1G2 (a) Time of a query cycle Number of tags 200 400 600 800 1000 Number of frames 0 5 10 15 FTPS C1G2 (b) Frame numbers of a query cycle Fig. 13: Evaluation of querying time VIII. CONCLUSION In this paper, we propose a real-time approach to detect the moving tags in the monitoring area. We achieve the time efficiency by decoding collisions from the physical layer. We are able to extract two physical-layer features, i.e., the phase profile and the backscatter link frequency, to distinguish different tags. By resolving the physical-layer features from collisions, we are able to derive the motion status of multiple tags. Experiment result shows that when monitoring 1000 tags, our solution can accurately detect the moving tags while reducing 80% time compared with the state-of-art solutions. ACKNOWLEDGMENT This work is supported in part by National Natural Science Foundation of China under Grant Nos. 61472185, 61373129, 61321491, 91218302, 61502224; JiangSu Natural Science Foundation, No. BK20151390; Key Project of Jiangsu Research Program under Grant No. BE2013116; EU FP7 IRSES MobileCloud Project under Grant No. 612212; CCF-Tencent Open Fund; China Postdoctor Science Fund under Grant No. 2015M570434. This work is partially supported by Collaborative Innovation Center of Novel Software Technology and Industrialization. Lei Xie is the corresponding author. REFERENCES [1] L. Xie, Q. Li, X. Chen, S. Lu, and D. Chen, “Continuous scanning with mobile reader in RFID systems: An experimental study.” in Proc. of MobiHoc, 2013. [2] J. Gummeson, P. Zhang, and D. Ganesan, “Flit: a bulk transmission protocol for rfid-scale sensors,” in Proc. of ACM MobiSys, 2012. [3] S. Chen, M. Zhang, and B. Xiao, “Efficient information collection protocols for sensor-augmented RFID networks.” in Proc. of INFOCOM, 2011. [4] “EPC C1G2 Protocol,” http://www.epcglobalinc.org/standards/uhfc1g2. [5] L. Yang, Y. Qi, J. Fang, X. Ding, T. Liu, and M. Li, “Frogeye: Perception of the slightest tag motion,” in Proc. of IEEE INFOCOM, 2014. [6] T. Liu, L. Yang, X.-Y. Li, H. Huang, and Y. Liu, “Tagbooth: Deep shopping data acquisition powered by rfid tags,” in Proc. of IEEE INFOCOM, 2015. [7] J. Wang, H. Hassanieh, D. Katabi, and P. Indyk, “Efficient and reliable low-power backscatter networks,” in Proc. of ACM SIGCOMM, 2012. [8] J. Ou, M. Li, and Y. Zheng, “Come and be served: Parallel decoding for cots rfid tags,” in Proc. of ACM MobiCom, 2015. [9] P. Hu, P. Zhang, and D. Ganesan, “Laissez-faire: Fully asymmetric backscatter communication,” in Proc. of ACM SIGCOMM, 2015. [10] Y. Zheng and M. Li, “P-MTI: Physical-layer missing tag identification via compressive sensing,” in Proc. of IEEE INFOCOM, 2013. [11] L. Yang, Y. Chen, X.-Y. Li, C. Xiao, M. Li, and Y. Liu, “Tagoram: Real-time tracking of mobile RFID tags to high precision using COTS devices,” in Proc. of ACM MobiCom, 2014. [12] J. Wang and D. Katabi, “Dude, wheres my card? RFID positioning that works with multipath and non-line of sight,” in Proc. of ACM SIGCOMM, 2013. [13] Y. Hou, J. Ou, Y. Zheng, and M. Li, “PLACE: Physical layer cardinality estimation for large-scale RFID systems,” in Proc. of INFOCOM, 2015. [14] M. Buettner and D. Wetherall, “A software radio-based UHF RFID reader for PHY/MAC experimentation,” in Proc. of IEEE RFID, 2011. [15] Y. Zheng and M. Li, “Read bulk data from computational RFIDs,” in Proc. of IEEE INFOCOM, 2014. [16] D. Zanetti, B. Danev et al., “Physical-layer identification of UHF RFID tags,” in Proc. of ACM MobiCom, 2010, pp. 353–364. [17] B. Danev, S. Capkun, R. Jayaram Masti, and T. S. Benjamin, “Towards practical identification of HF RFID devices,” ACM TISSEC, 2012. [18] D. Ma, C. Qian, W. Li, J. Han, and J. Zhao, “Geneprint: Generic and accurate physical-layer identification for UHF RFID tags,” in Proc. of IEEE ICNP, 2013. [19] D. De Donno, F. Ricciato, L. Catarinucci, A. Coluccia, and L. Tarricone, “Challenge: towards distributed RFID sensing with software-defined radio,” in Proc. of ACM MobiCom, 2010. [20] H. W. Kuhn, “The hungarian method for the assignment problem,” Naval research logistics quarterly, 1955