正在加载图片...
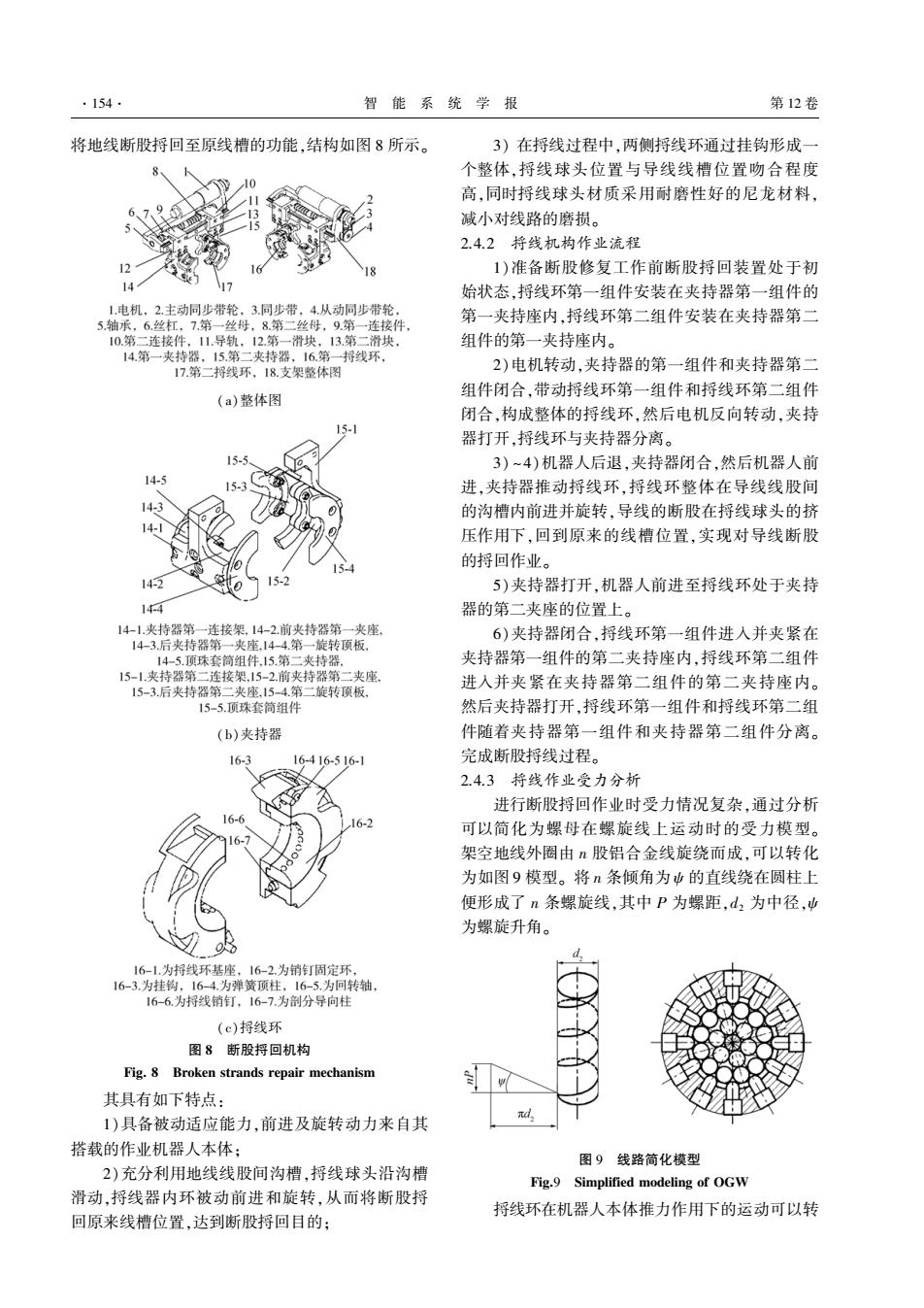
·154· 智能系统学报 第12卷 将地线断股捋回至原线槽的功能,结构如图8所示。 3)在捋线过程中,两侧捋线环通过挂钩形成一 个整体,捋线球头位置与导线线槽位置吻合程度 0 高,同时捋线球头材质采用耐磨性好的尼龙材料, 减小对线路的磨损。 2.4.2捋线机构作业流程 1)准备断股修复工作前断股捋回装置处于初 14 17 始状态,捋线环第一组件安装在夹持器第一组件的 1.电机,2.主动同步带轮,3.同步带,4.从动同步带轮, 5轴承,6丝杠,7第一丝母,8.第二丝母,9.第一连接件 第一夹持座内,捋线环第二组件安装在夹持器第二 10.第二连接件,11.导轨,12第一滑块,13第二滑块, 组件的第一夹持座内。 14.第一夹持器,15.第二夹持器,16.第一捋线环, 17.第二捋线环,18.支架整体图 2)电机转动,夹持器的第一组件和夹持器第二 组件闭合,带动捋线环第一组件和捋线环第二组件 (a)整体图 闭合,构成整体的捋线环,然后电机反向转动,夹持 15-l 器打开,捋线环与夹持器分离。 15-5 3)~4)机器人后退,夹持器闭合,然后机器人前 14-5 进,夹持器推动捋线环,捋线环整体在导线线股间 4.3 的沟槽内前进并旋转,导线的断股在捋线球头的挤 a- 压作用下,回到原来的线槽位置,实现对导线断股 的捋回作业。 14-2 0 15 5)夹持器打开,机器人前进至捋线环处于夹持 144 器的第二夹座的位置上。 14-1.夹持器第一连接架.14-2.前夹持器第一夹座 6)夹持器闭合,捋线环第一组件进人并夹紧在 14-3.后夹持器第一夹座,14-4.第一旋转顶板, 14-5.顶珠套简组件.15.第二夹持器 夹持器第一组件的第二夹持座内,捋线环第二组件 15-1.夹持器第二连接架,15-2.前夹持器第二夹座. 进入并夹紧在夹持器第二组件的第二夹持座内。 15-3.后夹持器第二夹座,15-4第二旋转顶板. 15-5.顶珠套筒组件 然后夹持器打开,捋线环第一组件和捋线环第二组 (b)夹持器 件随着夹持器第一组件和夹持器第二组件分离。 16-3 16-416-516-1 完成断股捋线过程。 2.4.3捋线作业受力分析 进行断股捋回作业时受力情况复杂,通过分析 16-6 16-2 可以简化为螺母在螺旋线上运动时的受力模型。 116-7 架空地线外圈由n股铝合金线旋绕而成,可以转化 为如图9模型。将n条倾角为中的直线绕在圆柱上 便形成了n条螺旋线,其中P为螺距,d2为中径,山 为螺旋升角。 0 16-1.为捋线环基座,16-2.为销钉固定环, 16-3.为挂钩,16-4.为弹簧顶柱,16-5.为回转轴 16-6.为捋线销钉.16-7.为剖分导向柱 (c)捋线环 图8断股捋回机构 Fig.8 Broken strands repair mechanism 其具有如下特点: nd 1)具备被动适应能力,前进及旋转动力来自其 搭载的作业机器人本体: 图9线路简化模型 2)充分利用地线线股间沟槽,捋线球头沿沟槽 Fig.9 Simplified modeling of OGW 滑动,捋线器内环被动前进和旋转,从而将断股捋 捋线环在机器人本体推力作用下的运动可以转 回原来线槽位置,达到断股捋回目的:将地线断股捋回至原线槽的功能袁结构如图 愿 所示遥 渊葬冤整体图 渊遭冤夹持器 渊糟冤捋线环 图 愿摇 断股捋回机构 云蚤早援 愿摇 月则燥噪藻灶 泽贼则葬灶凿泽 则藻责葬蚤则 皂藻糟澡葬灶蚤泽皂 摇 摇 其具有如下特点院 员冤具备被动适应能力袁前进及旋转动力来自其 搭载的作业机器人本体曰 圆冤充分利用地线线股间沟槽袁捋线球头沿沟槽 滑动袁捋线器内环被动前进和旋转袁从而将断股捋 回原来线槽位置袁达到断股捋回目的曰 猿冤 在捋线过程中袁两侧捋线环通过挂钩形成一 个整体袁捋线球头位置与导线线槽位置吻合程度 高袁同时捋线球头材质采用耐磨性好的尼龙材料袁 减小对线路的磨损遥 圆援源援圆摇 捋线机构作业流程 员冤准备断股修复工作前断股捋回装置处于初 始状态袁捋线环第一组件安装在夹持器第一组件的 第一夹持座内袁捋线环第二组件安装在夹持器第二 组件的第一夹持座内遥 圆冤电机转动袁夹持器的第一组件和夹持器第二 组件闭合袁带动捋线环第一组件和捋线环第二组件 闭合袁构成整体的捋线环袁然后电机反向转动袁夹持 器打开袁捋线环与夹持器分离遥 猿冤 耀 源冤机器人后退袁夹持器闭合袁然后机器人前 进袁夹持器推动捋线环袁捋线环整体在导线线股间 的沟槽内前进并旋转袁导线的断股在捋线球头的挤 压作用下袁回到原来的线槽位置袁实现对导线断股 的捋回作业遥 缘冤夹持器打开袁机器人前进至捋线环处于夹持 器的第二夹座的位置上遥 远冤夹持器闭合袁捋线环第一组件进入并夹紧在 夹持器第一组件的第二夹持座内袁捋线环第二组件 进入并夹紧在夹持器第二组件的第二夹持座内遥 然后夹持器打开袁捋线环第一组件和捋线环第二组 件随着夹持器第一组件和夹持器第二组件分离遥 完成断股捋线过程遥 圆援源援猿摇 捋线作业受力分析 进行断股捋回作业时受力情况复杂袁通过分析 可以简化为螺母在螺旋线上运动时的受力模型遥 架空地线外圈由 灶 股铝合金线旋绕而成袁可以转化 为如图 怨 模型遥 将 灶 条倾角为 鬃 的直线绕在圆柱上 便形成了 灶 条螺旋线袁其中 孕 为螺距袁凿圆 为中径袁鬃 为螺旋升角遥 图 怨摇 线路简化模型 云蚤早援怨摇 杂蚤皂责造蚤枣蚤藻凿 皂燥凿藻造蚤灶早 燥枣 韵郧宰 捋线环在机器人本体推力作用下的运动可以转 窑员缘源窑 智 能 系 统 学 报摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇 第 员圆 卷