正在加载图片...
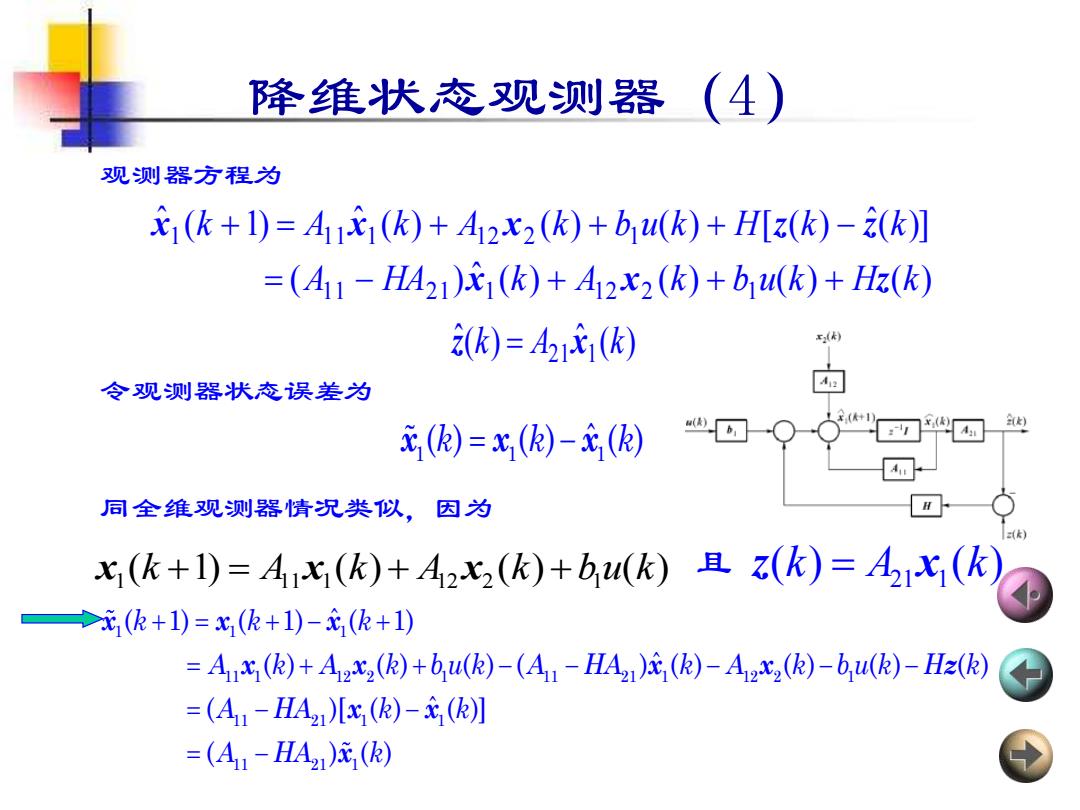
降维状态观测器 (4) 观测器方程为 x(k+1)=A1x(k)+A12x2(k)+bu(k)+H[z(k)-(k)] =(A11-HA21)x1(k)+A12x2(k)+b4(k)+H(k) k)=42(k) 令观测器状态误差为 x( 划 x()=x(2)-x(E) 同全维观测器情况类似,因为 x(k+1)=A1(k)+A2x2(k)+bu(k)且(k)=A21飞(k Dx(k+1)=x(k+1)-(k+1) =Ax(k)+A2x2()+b,u(k)-(A1-HA2)x(2)-A2x2(k)-b,u(k)-Hz(k) =(A1-HA2i[x(k)-x(k】 =(A1-HA2)x()降维状态观测器(4) 观测器方程为 令观测器状态误差为 同全维观测器情况类似,因为 ( ) ˆ ( ) ( ) ( ) ( ) ˆ ( 1) ˆ ( ) ( ) ( ) [ ( ) ˆ( )] 1 1 2 1 1 1 2 2 1 1 1 1 1 1 2 2 1 A HA k A k b u k H k k A k A k b u k H k k x x z x x x z z = − + + + + = + + + − ˆ( ) ˆ ( ) 21 1 z k = A x k = − 1 1 1 x x x ( ) ( ) ( ) k k k ˆ + = + − + = + + − − − − − = − − = − 1 1 1 11 1 12 2 1 11 21 1 12 2 1 11 21 1 1 11 21 1 ( 1) ( 1) ( 1) ˆ ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ˆ ( )[ ( ) ( )] ˆ ( ) ( ) k k k A k A k b u k A HA k A k b u k H k A HA k k A HA k x x x x x x x z x x x 1 11 1 12 2 1 x x x ( 1) ( ) ( ) ( ) k A k A k b u k + = + + 21 1 且 z x ( ) ( ) k A k =