正在加载图片...
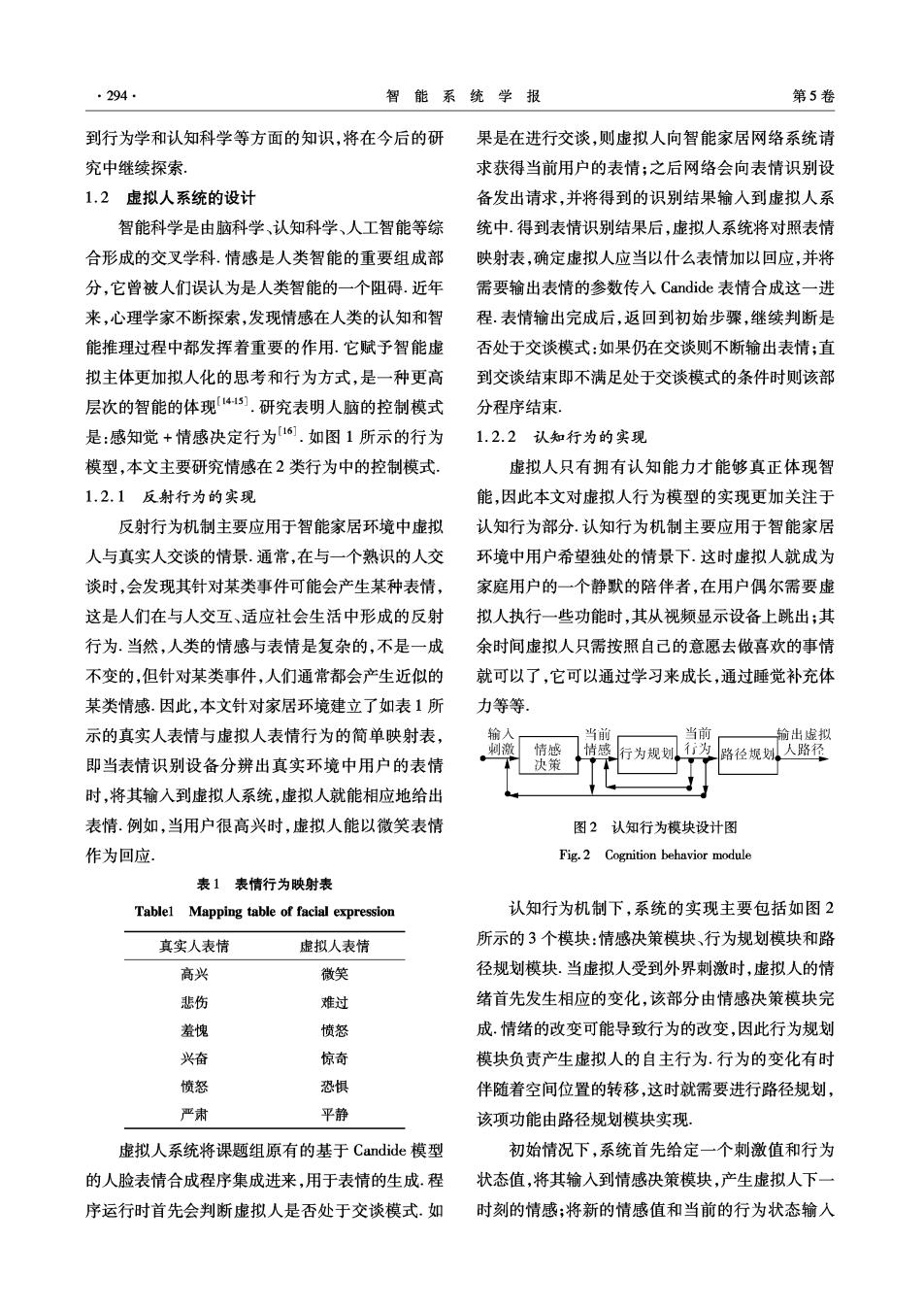
·294 智能系统学报 第5卷 到行为学和认知科学等方面的知识,将在今后的研 果是在进行交谈,则虚拟人向智能家居网络系统请 究中继续探索 求获得当前用户的表情;之后网络会向表情识别设 1.2虚拟人系统的设计 备发出请求,并将得到的识别结果输人到虚拟人系 智能科学是由脑科学、认知科学、人工智能等综 统中.得到表情识别结果后,虚拟人系统将对照表情 合形成的交叉学科.情感是人类智能的重要组成部 映射表,确定虚拟人应当以什么表情加以回应,并将 分,它曾被人们误认为是人类智能的一个阻碍.近年 需要输出表情的参数传人Candide表情合成这一进 来,心理学家不断探索,发现情感在人类的认知和智 程.表情输出完成后,返回到初始步骤,继续判断是 能推理过程中都发挥着重要的作用.它赋予智能虚 否处于交谈模式:如果仍在交谈则不断输出表情;直 拟主体更加拟人化的思考和行为方式,是一种更高 到交谈结束即不满足处于交谈模式的条件时则该部 层次的智能的体现45).研究表明人脑的控制模式 分程序结束 是:感知觉+情感决定行为16.如图1所示的行为 1.2.2认知行为的实现 模型,本文主要研究情感在2类行为中的控制模式 虚拟人只有拥有认知能力才能够真正体现智 1.2.1反射行为的实现 能,因此本文对虚拟人行为模型的实现更加关注于 反射行为机制主要应用于智能家居环境中虚拟 认知行为部分.认知行为机制主要应用于智能家居 人与真实人交谈的情景.通常,在与一个熟识的人交 环境中用户希望独处的情景下.这时虚拟人就成为 谈时,会发现其针对某类事件可能会产生某种表情, 家庭用户的一个静默的陪伴者,在用户偶尔需要虚 这是人们在与人交互、适应社会生活中形成的反射 拟人执行一些功能时,其从视频显示设备上跳出;其 行为.当然,人类的情感与表情是复杂的,不是一成 余时间虚拟人只需按照自己的意愿去做喜欢的事情 不变的,但针对某类事件,人们通常都会产生近似的 就可以了,它可以通过学习来成长,通过睡觉补充体 某类情感.因此,本文针对家居环境建立了如表1所 力等等 示的真实人表情与虚拟人表情行为的简单映射表, 当前 当前 输出墟拟 情感 后 行为规 路径规划,人路径 即当表情识别设备分辨出真实环境中用户的表情 决策 时,将其输入到虚拟人系统,虚拟人就能相应地给出 表情.例如,当用户很高兴时,虚拟人能以微笑表情 图2认知行为模块设计图 作为回应 Fig.2 Cognition behavior module 表1表情行为映射表 Tablel Mapping table of facial expression 认知行为机制下,系统的实现主要包括如图2 真实人表情 虚拟人表情 所示的3个模块:情感决策模块、行为规划模块和路 高兴 微笑 径规划模块.当虚拟人受到外界刺激时,虚拟人的情 悲伤 难过 绪首先发生相应的变化,该部分由情感决策模块完 羞愧 愤怒 成情绪的改变可能导致行为的改变,因此行为规划 兴奋 惊奇 模块负责产生虚拟人的自主行为.行为的变化有时 愤怒 恐惧 伴随着空间位置的转移,这时就需要进行路径规划, 严肃 平静 该项功能由路径规划模块实现 虚拟人系统将课题组原有的基于Candide模型 初始情况下,系统首先给定一个刺激值和行为 的人脸表情合成程序集成进来,用于表情的生成.程 状态值,将其输入到情感决策模块,产生虚拟人下一 序运行时首先会判断虚拟人是否处于交谈模式.如 时刻的情感;将新的情感值和当前的行为状态输入