正在加载图片...
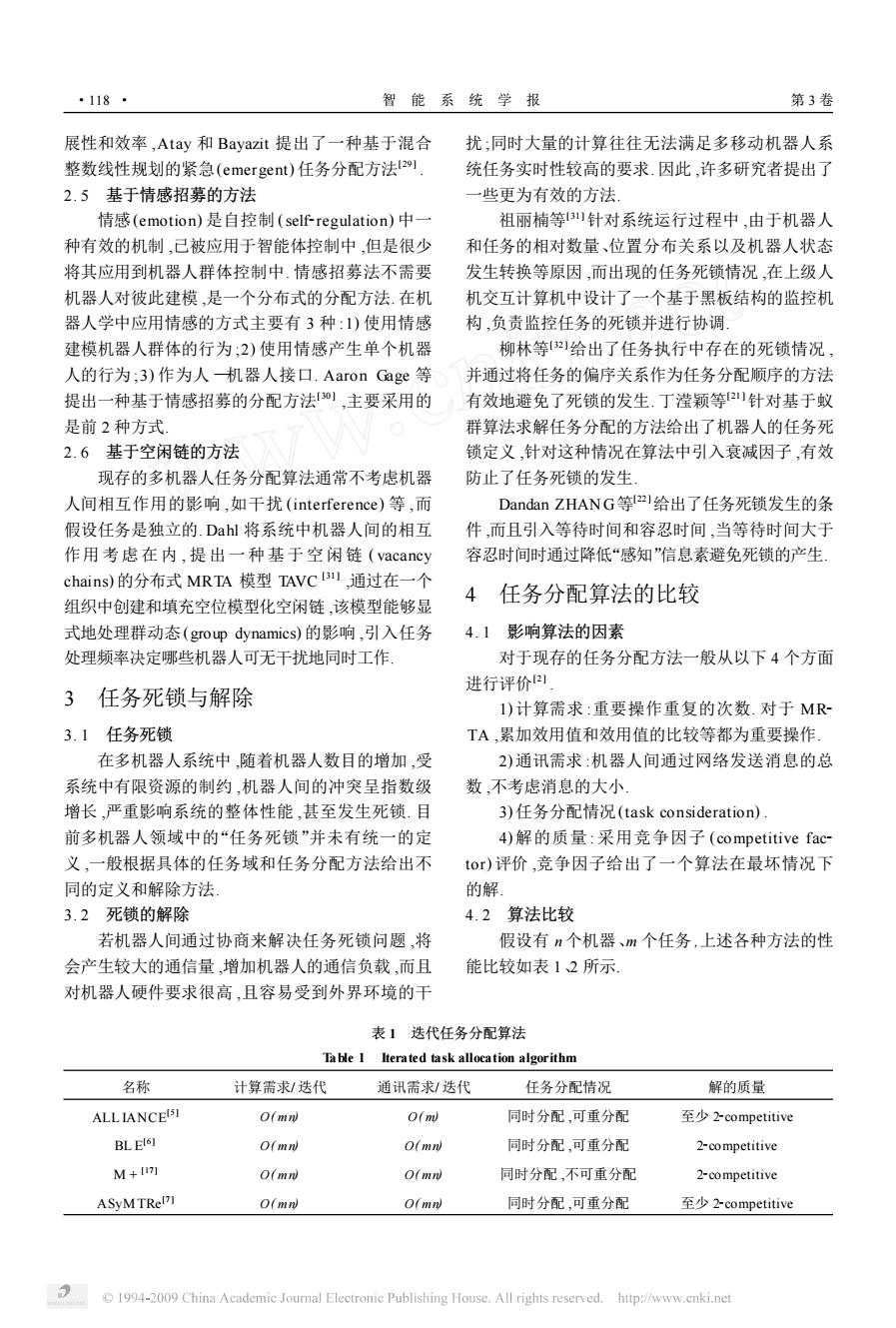
·118· 智能系统学报 第3卷 展性和效率,Atay和Bayazit提出了一种基于混合 扰;同时大量的计算往往无法满足多移动机器人系 整数线性规划的紧急(emergent)任务分配方法2) 统任务实时性较高的要求.因此,许多研究者提出了 2.5基于情感招募的方法 一些更为有效的方法, 情感(emotion)是自控制(self-regulation)中一 祖丽楠等3川针对系统运行过程中,由于机器人 种有效的机制,己被应用于智能体控制中,但是很少 和任务的相对数量、位置分布关系以及机器人状态 将其应用到机器人群体控制中.情感招募法不需要 发生转换等原因,而出现的任务死锁情况,在上级人 机器人对彼此建模,是一个分布式的分配方法.在机 机交互计算机中设计了一个基于黑板结构的监控机 器人学中应用情感的方式主要有3种:1)使用情感 构,负责监控任务的死锁并进行协调」 建模机器人群体的行为;2)使用情感产生单个机器 柳林等2]给出了任务执行中存在的死锁情况, 人的行为;3)作为人一机器人接口.Aaron Gage等 并通过将任务的偏序关系作为任务分配顺序的方法 提出一种基于情感招募的分配方法0),主要采用的 有效地避免了死锁的发生.丁滢颖等2针对基于蚁 是前2种方式, 群算法求解任务分配的方法给出了机器人的任务死 2.6基于空闲链的方法 锁定义,针对这种情况在算法中引入衰减因子,有效 现存的多机器人任务分配算法通常不考虑机器 防止了任务死锁的发生 人间相互作用的影响,如干扰(interference)等,而 Dandan ZHANG等221给出了任务死锁发生的条 假设任务是独立的.Dahl将系统中机器人间的相互 件,而且引入等待时间和容忍时间,当等待时间大于 作用考虑在内,提出一种基于空闲链(vacancy 容忍时间时通过降低“感知”信息素避免死锁的产生 chains))的分布式MRTA模型TAVC】,通过在一个 4任务分配算法的比较 组织中创建和填充空位模型化空闲链,该模型能够显 式地处理群动态(group dynamics)的影响,引入任务 4.1 影响算法的因素 处理频率决定哪些机器人可无干扰地同时工作」 对于现存的任务分配方法一般从以下4个方面 进行评价) 3任务死锁与解除 1)计算需求:重要操作重复的次数.对于MR 3.1任务死锁 TA,累加效用值和效用值的比较等都为重要操作. 在多机器人系统中,随着机器人数目的增加,受 2)通讯需求:机器人间通过网络发送消息的总 系统中有限资源的制约,机器人间的冲突呈指数级 数,不考虑消息的大小 增长,严重影响系统的整体性能,甚至发生死锁.目 3)任务分配情况(task consideration) 前多机器人领域中的“任务死锁”并未有统一的定 4)解的质量:采用竞争因子(competitive fac- 义,一般根据具体的任务域和任务分配方法给出不 tor)评价,竞争因子给出了一个算法在最坏情况下 同的定义和解除方法, 的解 3.2死锁的解除 4.2算法比较 若机器人间通过协商来解决任务死锁问题,将 假设有n个机器、m个任务,上述各种方法的性 会产生较大的通信量,增加机器人的通信负载,而且 能比较如表12所示 对机器人硬件要求很高,且容易受到外界环境的干 表1迭代任务分配算法 Ta ble I Iterated task allocation algorithm 名称 计算需求/迭代 通讯需求/迭代 任务分配情况 解的质量 ALL IANCEIS1 O(mn O(m) 同时分配,可重分配 至少2-competitive BLEI6] O(mn) O(mn) 同时分配,可重分配 2-competitive M+ O(m刊 O(mn) 司时分配,不可重分配 2-competitive ASyMTRel7 O(mn) O(mn 同时分配,可重分配 至少2 competitive 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net展性和效率 ,Atay 和 Bayazit 提出了一种基于混合 整数线性规划的紧急(emergent) 任务分配方法[29 ] . 2. 5 基于情感招募的方法 情感(emotion) 是自控制 (self2regulation) 中一 种有效的机制 ,已被应用于智能体控制中 ,但是很少 将其应用到机器人群体控制中. 情感招募法不需要 机器人对彼此建模 ,是一个分布式的分配方法. 在机 器人学中应用情感的方式主要有 3 种 :1) 使用情感 建模机器人群体的行为 ;2) 使用情感产生单个机器 人的行为 ;3) 作为人 —机器人接口. Aaron Gage 等 提出一种基于情感招募的分配方法[ 30 ] ,主要采用的 是前 2 种方式. 2. 6 基于空闲链的方法 现存的多机器人任务分配算法通常不考虑机器 人间相互作用的影响 ,如干扰 (interference) 等 ,而 假设任务是独立的. Dahl 将系统中机器人间的相互 作用 考虑在内 , 提出一 种基于空 闲链 ( vacancy chains) 的分布式 MRTA 模型 TAVC [31 ] ,通过在一个 组织中创建和填充空位模型化空闲链 ,该模型能够显 式地处理群动态(group dynamics) 的影响 ,引入任务 处理频率决定哪些机器人可无干扰地同时工作. 3 任务死锁与解除 3. 1 任务死锁 在多机器人系统中 ,随着机器人数目的增加 ,受 系统中有限资源的制约 ,机器人间的冲突呈指数级 增长 ,严重影响系统的整体性能 ,甚至发生死锁. 目 前多机器人领域中的“任务死锁”并未有统一的定 义 ,一般根据具体的任务域和任务分配方法给出不 同的定义和解除方法. 3. 2 死锁的解除 若机器人间通过协商来解决任务死锁问题 ,将 会产生较大的通信量 ,增加机器人的通信负载 ,而且 对机器人硬件要求很高 ,且容易受到外界环境的干 扰 ;同时大量的计算往往无法满足多移动机器人系 统任务实时性较高的要求. 因此 ,许多研究者提出了 一些更为有效的方法. 祖丽楠等[31 ]针对系统运行过程中 ,由于机器人 和任务的相对数量、位置分布关系以及机器人状态 发生转换等原因 ,而出现的任务死锁情况 ,在上级人 机交互计算机中设计了一个基于黑板结构的监控机 构 ,负责监控任务的死锁并进行协调. 柳林等[32 ]给出了任务执行中存在的死锁情况 , 并通过将任务的偏序关系作为任务分配顺序的方法 有效地避免了死锁的发生. 丁滢颖等[21 ] 针对基于蚁 群算法求解任务分配的方法给出了机器人的任务死 锁定义 ,针对这种情况在算法中引入衰减因子 ,有效 防止了任务死锁的发生. Dandan ZHAN G等[22 ]给出了任务死锁发生的条 件 ,而且引入等待时间和容忍时间 ,当等待时间大于 容忍时间时通过降低“感知”信息素避免死锁的产生. 4 任务分配算法的比较 4. 1 影响算法的因素 对于现存的任务分配方法一般从以下 4 个方面 进行评价[2 ] . 1) 计算需求 :重要操作重复的次数. 对于 MR2 TA ,累加效用值和效用值的比较等都为重要操作. 2) 通讯需求 :机器人间通过网络发送消息的总 数 ,不考虑消息的大小. 3) 任务分配情况(task consideration) . 4) 解的质量 :采用竞争因子 ( competitive fac2 tor) 评价 ,竞争因子给出了一个算法在最坏情况下 的解. 4. 2 算法比较 假设有 n 个机器、m 个任务 ,上述各种方法的性 能比较如表 1、2 所示. 表 1 迭代任务分配算法 Table 1 Iterated task allocation algorithm 名称 计算需求/ 迭代 通讯需求/ 迭代 任务分配情况 解的质量 ALL IANCE [5 ] O( mn) O( m) 同时分配 ,可重分配 至少 22competitive BL E [6 ] O( mn) O( mn) 同时分配 ,可重分配 22competitive M + [17 ] O( mn) O( mn) 同时分配 ,不可重分配 22competitive ASyMTRe [7 ] O( mn) O( mn) 同时分配 ,可重分配 至少 22competitive ·118 · 智 能 系 统 学 报 第 3 卷