正在加载图片...
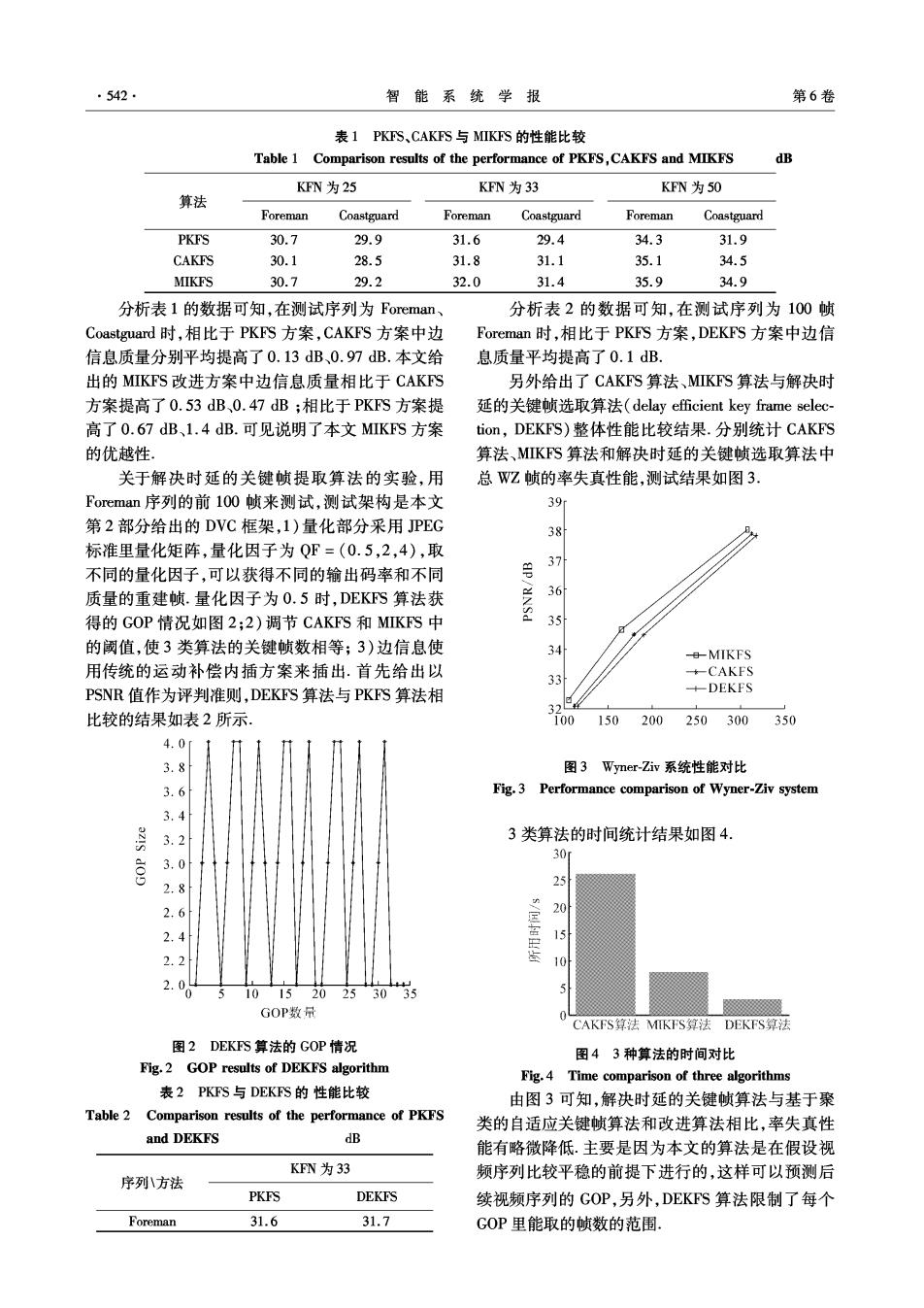
·542 智能系统学报 第6卷 表1PKFS、CAKFS与MIKFS的性能比较 Table 1 Comparison results of the performance of PKFS,CAKFS and MIKFS dB KFN为25 KFN为33 KFN为50 算法 Foreman Coastguard Foreman Coastguard Foreman Coastguard PKFS 30.7 29.9 31.6 29.4 34.3 31.9 CAKFS 30.1 28.5 31.8 31.1 35.1 34.5 MIKFS 30.7 29.2 32.0 31.4 35.9 34.9 分析表1的数据可知,在测试序列为Foreman、 分析表2的数据可知,在测试序列为100帧 Coastguard时,相比于PKFS方案,CAKFS方案中边 Foreman时,相比于PKFS方案,DEKFS方案中边信 信息质量分别平均提高了0.13dB、0.97dB.本文给 息质量平均提高了0.1dB 出的MIKFS改进方案中边信息质量相比于CAKFS 另外给出了CAKFS算法、MIKFS算法与解决时 方案提高了0.53dB0.47dB;相比于PKFS方案提 延的关键帧选取算法(delay efficient key frame selec- 高了0.67dB、1.4dB.可见说明了本文MIKFS方案 tion,DEKFS)整体性能比较结果.分别统计CAKFS 的优越性。 算法、MKFS算法和解决时延的关键帧选取算法中 关于解决时延的关键帧提取算法的实验,用 总WZ帧的率失真性能,测试结果如图3, Foreman序列的前l00帧来测试,测试架构是本文 39 第2部分给出的DVC框架,1)量化部分采用PEG 38 标准里量化矩阵,量化因子为QF=(0.5,2,4),取 37 不同的量化因子,可以获得不同的输出码率和不同 质量的重建帧.量化因子为0.5时,DEKFS算法获 36 得的GOP情况如图2;2)调节CAKFS和MIKFS中 35 的阈值,使3类算法的关键帧数相等;3)边信息使 34 --MIKFS 用传统的运动补偿内插方案来插出.首先给出以 CAKFS 33 PSNR值作为评判准则,DEKFS算法与PKFS算法相 DEKFS 37 比较的结果如表2所示. 100 150 200 250300 350 4.0 3.8 图3 Wyner-.Ziv系统性能对比 3.6 Fig.3 Performance comparison of Wyner-Ziv system 3.4 3.2 3类算法的时间统计结果如图4. 30 3.0 2.8 25 6 20 2.4 2.2 10 2.0 10 15 20 253035 GOP数吊 w CAKFS算法MIKFS算法DEKFS算法 图2 DEKFS算法的GOP情况 图43种算法的时间对比 Fig.2 GOP results of DEKFS algorithm Fig.4 Time comparison of three algorithms 表2PKFS与DEKFS的性能比较 由图3可知,解决时延的关键帧算法与基于聚 Table 2 Comparison results of the performance of PKFS 类的自适应关键帧算法和改进算法相比,率失真性 and DEKFS dB 能有略微降低.主要是因为本文的算法是在假设视 KFN为33 序列方法 频序列比较平稳的前提下进行的,这样可以预测后 PKFS DEKFS 续视频序列的GOP,另外,DEKFS算法限制了每个 Foreman 31.6 31.7 GOP里能取的帧数的范围