正在加载图片...
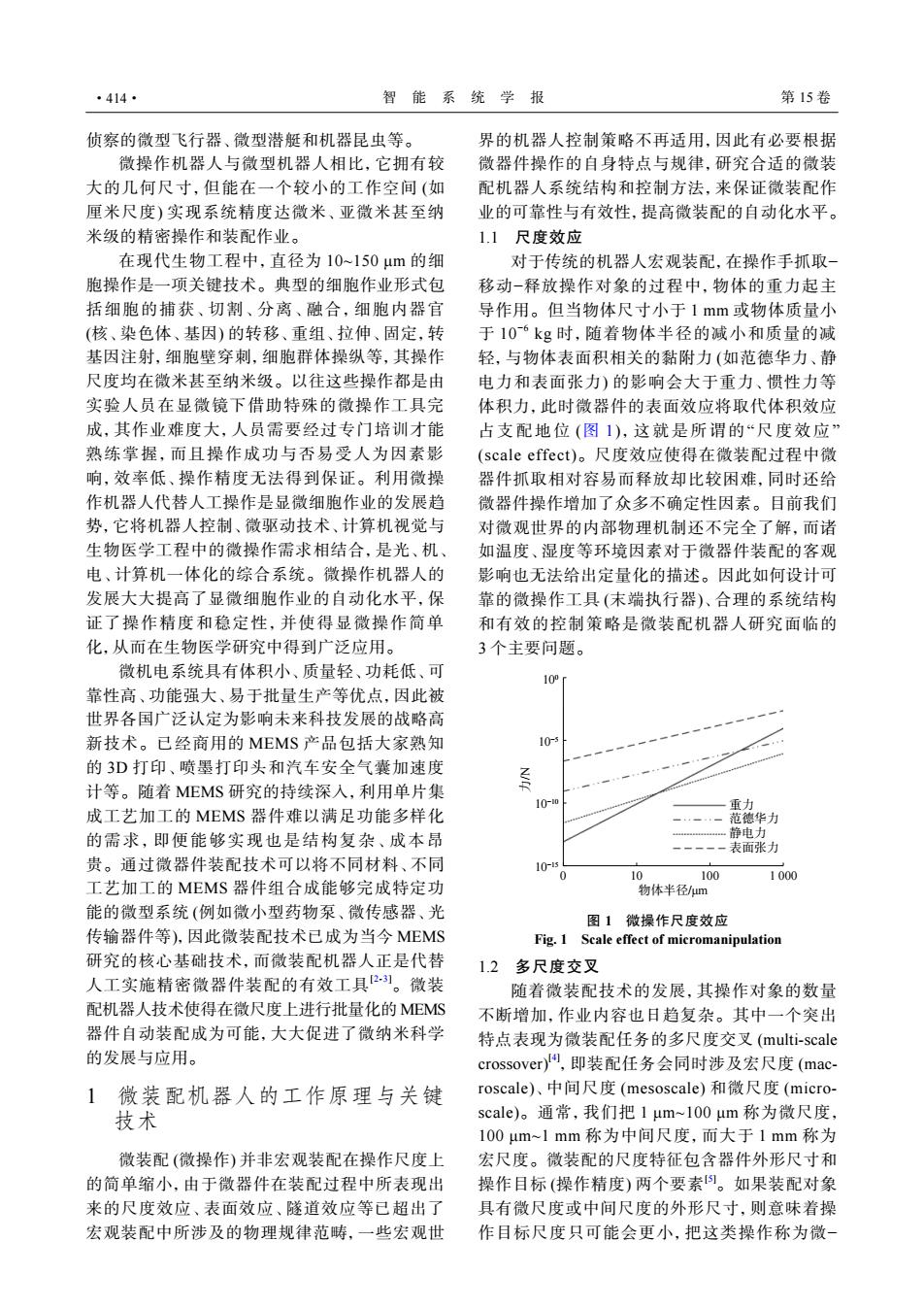
·414· 智能系统学报 第15卷 侦察的微型飞行器、微型潜艇和机器昆虫等。 界的机器人控制策略不再适用,因此有必要根据 微操作机器人与微型机器人相比,它拥有较 微器件操作的自身特点与规律,研究合适的微装 大的几何尺寸,但能在一个较小的工作空间(如 配机器人系统结构和控制方法,来保证微装配作 厘米尺度)实现系统精度达微米、亚微米甚至纳 业的可靠性与有效性,提高微装配的自动化水平。 米级的精密操作和装配作业。 1.1尺度效应 在现代生物工程中,直径为10~150um的细 对于传统的机器人宏观装配,在操作手抓取 胞操作是一项关键技术。典型的细胞作业形式包 移动-释放操作对象的过程中,物体的重力起主 括细胞的捕获、切割、分离、融合,细胞内器官 导作用。但当物体尺寸小于1mm或物体质量小 (核、染色体、基因)的转移、重组、拉伸、固定,转 于106kg时,随着物体半径的减小和质量的减 基因注射,细胞壁穿刺,细胞群体操纵等,其操作 轻,与物体表面积相关的黏附力(如范德华力、静 尺度均在微米甚至纳米级。以往这些操作都是由 电力和表面张力)的影响会大于重力、惯性力等 实验人员在显微镜下借助特殊的微操作工具完 体积力,此时微器件的表面效应将取代体积效应 成,其作业难度大,人员需要经过专门培训才能 占支配地位(图1),这就是所谓的“尺度效应” 熟练掌握,而且操作成功与否易受人为因素影 (scale effect)。尺度效应使得在微装配过程中微 响,效率低、操作精度无法得到保证。利用微操 器件抓取相对容易而释放却比较困难,同时还给 作机器人代替人工操作是显微细胞作业的发展趋 微器件操作增加了众多不确定性因素。目前我们 势,它将机器人控制、微驱动技术、计算机视觉与 对微观世界的内部物理机制还不完全了解,而诸 生物医学工程中的微操作需求相结合,是光、机、 如温度、湿度等环境因素对于微器件装配的客观 电、计算机一体化的综合系统。微操作机器人的 影响也无法给出定量化的描述。因此如何设计可 发展大大提高了显微细胞作业的自动化水平,保 靠的微操作工具(末端执行器)、合理的系统结构 证了操作精度和稳定性,并使得显微操作简单 和有效的控制策略是微装配机器人研究面临的 化,从而在生物医学研究中得到广泛应用。 3个主要问题。 微机电系统具有体积小、质量轻、功耗低、可 10 靠性高、功能强大、易于批量生产等优点,因此被 世界各国广泛认定为影响未来科技发展的战略高 新技术。已经商用的MEMS产品包括大家熟知 10- 的3D打印、喷墨打印头和汽车安全气囊加速度 计等。随着MEMS研究的持续深入,利用单片集 N/t 10-0 重力 成工艺加工的MEMS器件难以满足功能多样化 范德华力 的需求,即便能够实现也是结构复杂、成本昂 静电力 表面张力 贵。通过微器件装配技术可以将不同材料、不同 10 1 100 1000 工艺加工的MEMS器件组合成能够完成特定功 物体半径m 能的微型系统(例如微小型药物泵、微传感器、光 图1微操作尺度效应 传输器件等),因此微装配技术已成为当今MEMS Fig.1 Scale effect of micromanipulation 研究的核心基础技术,而微装配机器人正是代替 1.2 多尺度交叉 人工实施精密微器件装配的有效工具)。微装 随着微装配技术的发展,其操作对象的数量 配机器人技术使得在微尺度上进行批量化的MEMS 不断增加,作业内容也日趋复杂。其中一个突出 器件自动装配成为可能,大大促进了微纳米科学 特点表现为微装配任务的多尺度交叉(multi-scale 的发展与应用。 crossover),即装配任务会同时涉及宏尺度(mac 1 微装配机器人的工作原理与关键 roscale)、中间尺度(mesoscale)和微尺度(micro- 技术 scale)。通常,我们把1um~l00um称为微尺度, 100um~1mm称为中间尺度,而大于1mm称为 微装配(微操作)并非宏观装配在操作尺度上 宏尺度。微装配的尺度特征包含器件外形尺寸和 的简单缩小,由于微器件在装配过程中所表现出 操作目标(操作精度)两个要素。如果装配对象 来的尺度效应、表面效应、隧道效应等已超出了 具有微尺度或中间尺度的外形尺寸,则意味着操 宏观装配中所涉及的物理规律范畴,一些宏观世 作目标尺度只可能会更小,把这类操作称为微侦察的微型飞行器、微型潜艇和机器昆虫等。 微操作机器人与微型机器人相比,它拥有较 大的几何尺寸,但能在一个较小的工作空间 (如 厘米尺度) 实现系统精度达微米、亚微米甚至纳 米级的精密操作和装配作业。 在现代生物工程中,直径为 10~150 μm 的细 胞操作是一项关键技术。典型的细胞作业形式包 括细胞的捕获、切割、分离、融合,细胞内器官 (核、染色体、基因) 的转移、重组、拉伸、固定,转 基因注射,细胞壁穿刺,细胞群体操纵等,其操作 尺度均在微米甚至纳米级。以往这些操作都是由 实验人员在显微镜下借助特殊的微操作工具完 成,其作业难度大,人员需要经过专门培训才能 熟练掌握,而且操作成功与否易受人为因素影 响,效率低、操作精度无法得到保证。利用微操 作机器人代替人工操作是显微细胞作业的发展趋 势,它将机器人控制、微驱动技术、计算机视觉与 生物医学工程中的微操作需求相结合,是光、机、 电、计算机一体化的综合系统。微操作机器人的 发展大大提高了显微细胞作业的自动化水平,保 证了操作精度和稳定性,并使得显微操作简单 化,从而在生物医学研究中得到广泛应用。 微机电系统具有体积小、质量轻、功耗低、可 靠性高、功能强大、易于批量生产等优点,因此被 世界各国广泛认定为影响未来科技发展的战略高 新技术。已经商用的 MEMS 产品包括大家熟知 的 3D 打印、喷墨打印头和汽车安全气囊加速度 计等。随着 MEMS 研究的持续深入,利用单片集 成工艺加工的 MEMS 器件难以满足功能多样化 的需求,即便能够实现也是结构复杂、成本昂 贵。通过微器件装配技术可以将不同材料、不同 工艺加工的 MEMS 器件组合成能够完成特定功 能的微型系统 (例如微小型药物泵、微传感器、光 传输器件等),因此微装配技术已成为当今 MEMS 研究的核心基础技术,而微装配机器人正是代替 人工实施精密微器件装配的有效工具[2-3]。微装 配机器人技术使得在微尺度上进行批量化的 MEMS 器件自动装配成为可能,大大促进了微纳米科学 的发展与应用。 1 微装配机器人的工作原理与关键 技术 微装配 (微操作) 并非宏观装配在操作尺度上 的简单缩小,由于微器件在装配过程中所表现出 来的尺度效应、表面效应、隧道效应等已超出了 宏观装配中所涉及的物理规律范畴,一些宏观世 界的机器人控制策略不再适用,因此有必要根据 微器件操作的自身特点与规律,研究合适的微装 配机器人系统结构和控制方法,来保证微装配作 业的可靠性与有效性,提高微装配的自动化水平。 1.1 尺度效应 对于传统的机器人宏观装配,在操作手抓取− 移动−释放操作对象的过程中,物体的重力起主 导作用。但当物体尺寸小于 1 mm 或物体质量小 于 10−6 kg 时,随着物体半径的减小和质量的减 轻,与物体表面积相关的黏附力 (如范德华力、静 电力和表面张力) 的影响会大于重力、惯性力等 体积力,此时微器件的表面效应将取代体积效应 占支配地位 (图 1),这就是所谓的“尺度效应” (scale effect)。尺度效应使得在微装配过程中微 器件抓取相对容易而释放却比较困难,同时还给 微器件操作增加了众多不确定性因素。目前我们 对微观世界的内部物理机制还不完全了解,而诸 如温度、湿度等环境因素对于微器件装配的客观 影响也无法给出定量化的描述。因此如何设计可 靠的微操作工具 (末端执行器)、合理的系统结构 和有效的控制策略是微装配机器人研究面临的 3 个主要问题。 重力 范德华力 静电力 表面张力 物体半径/μm 力/N 0 10 100 1 000 10−5 100 10−10 10−15 图 1 微操作尺度效应 Fig. 1 Scale effect of micromanipulation 1.2 多尺度交叉 随着微装配技术的发展,其操作对象的数量 不断增加,作业内容也日趋复杂。其中一个突出 特点表现为微装配任务的多尺度交叉 (multi-scale crossover)[4] ,即装配任务会同时涉及宏尺度 (macroscale)、中间尺度 (mesoscale) 和微尺度 (microscale)。通常,我们把 1 μm~100 μm 称为微尺度, 100 μm~1 mm 称为中间尺度,而大于 1 mm 称为 宏尺度。微装配的尺度特征包含器件外形尺寸和 操作目标 (操作精度) 两个要素[5]。如果装配对象 具有微尺度或中间尺度的外形尺寸,则意味着操 作目标尺度只可能会更小,把这类操作称为微− ·414· 智 能 系 统 学 报 第 15 卷