正在加载图片...
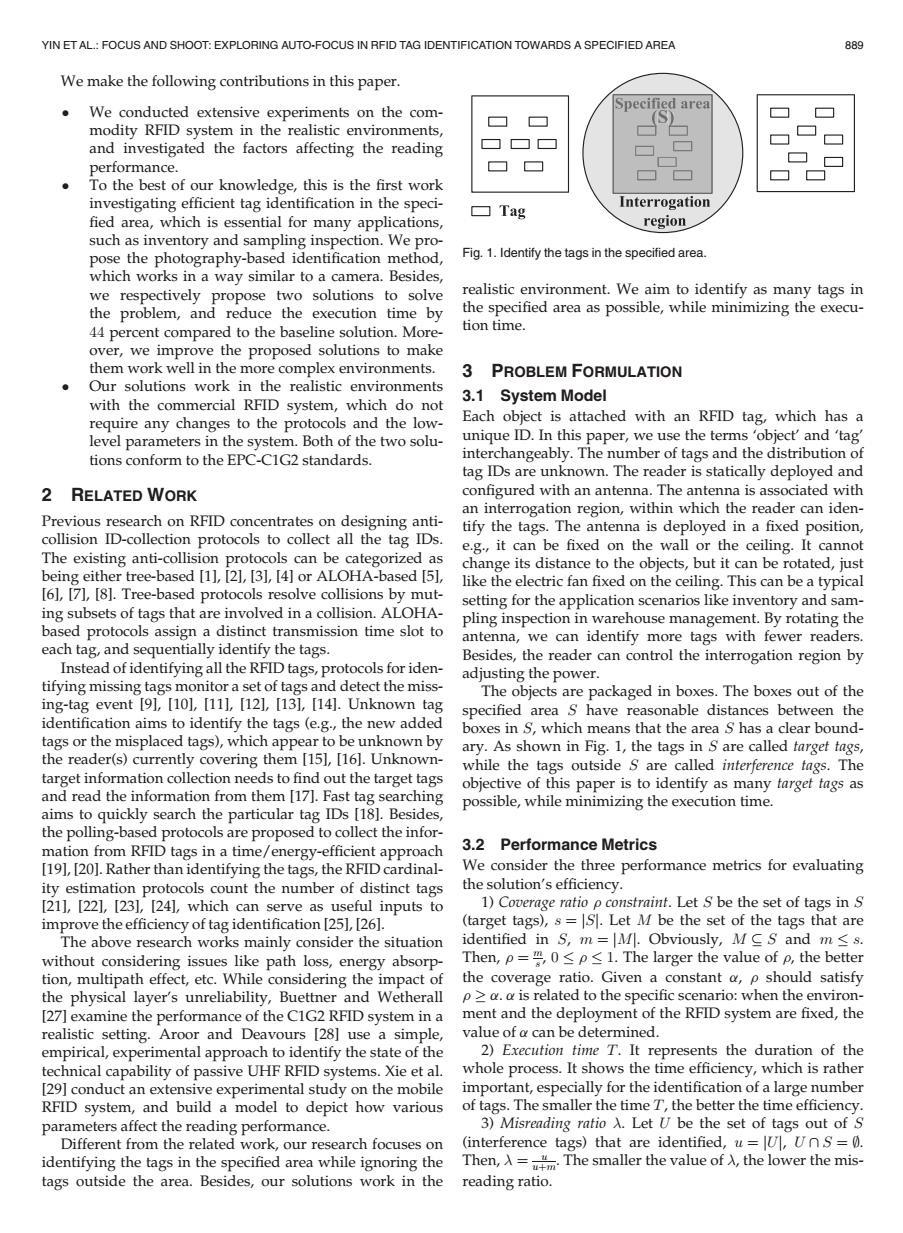
YIN ETAL:FOCUS AND SHOOT:EXPLORING AUTO-FOCUS IN RFID TAG IDENTIFICATION TOWARDS A SPECIFIED AREA 889 We make the following contributions in this paper. We conducted extensive experiments on the com- Specified area modity RFID system in the realistic environments, and investigated the factors affecting the reading performance. ● To the best of our knowledge,this is the first work investigating efficient tag identification in the speci- ☐Tag Interrogation fied area,which is essential for many applications, region such as inventory and sampling inspection.We pro- pose the photography-based identification method, Fig.1.Identify the tags in the specified area. which works in a way similar to a camera.Besides, we respectively propose two solutions to solve realistic environment.We aim to identify as many tags in the problem,and reduce the execution time by the specified area as possible,while minimizing the execu- 44 percent compared to the baseline solution.More- tion time over,we improve the proposed solutions to make them work well in the more complex environments. 3 PROBLEM FORMULATION Our solutions work in the realistic environments with the commercial RFID system,which do not 3.1 System Model require any changes to the protocols and the low- Each object is attached with an RFID tag,which has a level parameters in the system.Both of the two solu- unique ID.In this paper,we use the terms 'object'and 'tag' tions conform to the EPC-CIG2 standards. interchangeably.The number of tags and the distribution of tag IDs are unknown.The reader is statically deployed and 2 RELATED WORK configured with an antenna.The antenna is associated with an interrogation region,within which the reader can iden- Previous research on RFID concentrates on designing anti- tify the tags.The antenna is deployed in a fixed position, collision ID-collection protocols to collect all the tag IDs. e.g,it can be fixed on the wall or the ceiling.It cannot The existing anti-collision protocols can be categorized as change its distance to the objects,but it can be rotated,just being either tree-based [1],[2],[3],[4]or ALOHA-based [5], like the electric fan fixed on the ceiling.This can be a typical [6],[7],[8].Tree-based protocols resolve collisions by mut- setting for the application scenarios like inventory and sam- ing subsets of tags that are involved in a collision.ALOHA- pling inspection in warehouse management.By rotating the based protocols assign a distinct transmission time slot to antenna,we can identify more tags with fewer readers. each tag,and sequentially identify the tags. Besides,the reader can control the interrogation region by Instead of identifying all the RFID tags,protocols for iden- adjusting the power. tifying missing tags monitor a set of tags and detect the miss- The objects are packaged in boxes.The boxes out of the ing-tag event [9],[10],[11],[12],[13],[14].Unknown tag specified area S have reasonable distances between the identification aims to identify the tags (e.g,the new added boxes in S,which means that the area s has a clear bound- tags or the misplaced tags),which appear to be unknown by ary.As shown in Fig.1,the tags in S are called target tags, the reader(s)currently covering them [15],[16].Unknown- while the tags outside s are called interference tags.The target information collection needs to find out the target tags objective of this paper is to identify as many target tags as and read the information from them [17].Fast tag searching possible,while minimizing the execution time. aims to quickly search the particular tag IDs [181.Besides, the polling-based protocols are proposed to collect the infor- mation from RFID tags in a time/energy-efficient approach 3.2 Performance Metrics [19],[20].Rather than identifying the tags,the RFID cardinal- We consider the three performance metrics for evaluating ity estimation protocols count the number of distinct tags the solution's efficiency. [21],[221,[23],[24],which can serve as useful inputs to 1)Coverage ratio p constraint.Let S be the set of tags in S improve the efficiency of tag identification [25],[261. (target tags),s=S].Let M be the set of the tags that are The above research works mainly consider the situation identified in S,m=|Ml.Obviously,M≤S and m≤s. without considering issues like path loss,energy absorp- Then,p=",0<p<1.The larger the value of p,the better tion,multipath effect,etc.While considering the impact of the coverage ratio.Given a constant a,p should satisfy the physical layer's unreliability,Buettner and Wetherall p >a.a is related to the specific scenario:when the environ- [27]examine the performance of the C1G2 RFID system in a ment and the deployment of the RFID system are fixed,the realistic setting.Aroor and Deavours [28]use a simple, value of a can be determined. empirical,experimental approach to identify the state of the 2)Execution time T.It represents the duration of the technical capability of passive UHF RFID systems.Xie et al.whole process.It shows the time efficiency,which is rather [29]conduct an extensive experimental study on the mobile important,especially for the identification of a large number RFID system,and build a model to depict how various of tags.The smaller the time T,the better the time efficiency. parameters affect the reading performance. 3)Misreading ratio A.Let U be the set of tags out of S Different from the related work,our research focuses on (interference tags)that are identified,u=Ul,Uns=0. identifying the tags in the specified area while ignoring the Then,=The smaller the value of the lower the mis- tags outside the area.Besides,our solutions work in the reading ratio.We make the following contributions in this paper. We conducted extensive experiments on the commodity RFID system in the realistic environments, and investigated the factors affecting the reading performance. To the best of our knowledge, this is the first work investigating efficient tag identification in the speci- fied area, which is essential for many applications, such as inventory and sampling inspection. We propose the photography-based identification method, which works in a way similar to a camera. Besides, we respectively propose two solutions to solve the problem, and reduce the execution time by 44 percent compared to the baseline solution. Moreover, we improve the proposed solutions to make them work well in the more complex environments. Our solutions work in the realistic environments with the commercial RFID system, which do not require any changes to the protocols and the lowlevel parameters in the system. Both of the two solutions conform to the EPC-C1G2 standards. 2 RELATED WORK Previous research on RFID concentrates on designing anticollision ID-collection protocols to collect all the tag IDs. The existing anti-collision protocols can be categorized as being either tree-based [1], [2], [3], [4] or ALOHA-based [5], [6], [7], [8]. Tree-based protocols resolve collisions by muting subsets of tags that are involved in a collision. ALOHAbased protocols assign a distinct transmission time slot to each tag, and sequentially identify the tags. Instead of identifying all the RFID tags, protocols for identifying missing tags monitor a set of tags and detect the missing-tag event [9], [10], [11], [12], [13], [14]. Unknown tag identification aims to identify the tags (e.g., the new added tags or the misplaced tags), which appear to be unknown by the reader(s) currently covering them [15], [16]. Unknowntarget information collection needs to find out the target tags and read the information from them [17]. Fast tag searching aims to quickly search the particular tag IDs [18]. Besides, the polling-based protocols are proposed to collect the information from RFID tags in a time/energy-efficient approach [19], [20]. Rather than identifying the tags, the RFID cardinality estimation protocols count the number of distinct tags [21], [22], [23], [24], which can serve as useful inputs to improve the efficiency of tag identification [25], [26]. The above research works mainly consider the situation without considering issues like path loss, energy absorption, multipath effect, etc. While considering the impact of the physical layer’s unreliability, Buettner and Wetherall [27] examine the performance of the C1G2 RFID system in a realistic setting. Aroor and Deavours [28] use a simple, empirical, experimental approach to identify the state of the technical capability of passive UHF RFID systems. Xie et al. [29] conduct an extensive experimental study on the mobile RFID system, and build a model to depict how various parameters affect the reading performance. Different from the related work, our research focuses on identifying the tags in the specified area while ignoring the tags outside the area. Besides, our solutions work in the realistic environment. We aim to identify as many tags in the specified area as possible, while minimizing the execution time. 3 PROBLEM FORMULATION 3.1 System Model Each object is attached with an RFID tag, which has a unique ID. In this paper, we use the terms ‘object’ and ‘tag’ interchangeably. The number of tags and the distribution of tag IDs are unknown. The reader is statically deployed and configured with an antenna. The antenna is associated with an interrogation region, within which the reader can identify the tags. The antenna is deployed in a fixed position, e.g., it can be fixed on the wall or the ceiling. It cannot change its distance to the objects, but it can be rotated, just like the electric fan fixed on the ceiling. This can be a typical setting for the application scenarios like inventory and sampling inspection in warehouse management. By rotating the antenna, we can identify more tags with fewer readers. Besides, the reader can control the interrogation region by adjusting the power. The objects are packaged in boxes. The boxes out of the specified area S have reasonable distances between the boxes in S, which means that the area S has a clear boundary. As shown in Fig. 1, the tags in S are called target tags, while the tags outside S are called interference tags. The objective of this paper is to identify as many target tags as possible, while minimizing the execution time. 3.2 Performance Metrics We consider the three performance metrics for evaluating the solution’s efficiency. 1) Coverage ratio r constraint. Let S be the set of tags in S (target tags), s ¼ jSj. Let M be the set of the tags that are identified in S, m ¼ jMj. Obviously, M S and m s. Then, r ¼ m s , 0 r 1. The larger the value of r, the better the coverage ratio. Given a constant a, r should satisfy r a. a is related to the specific scenario: when the environment and the deployment of the RFID system are fixed, the value of a can be determined. 2) Execution time T. It represents the duration of the whole process. It shows the time efficiency, which is rather important, especially for the identification of a large number of tags. The smaller the time T, the better the time efficiency. 3) Misreading ratio . Let U be the set of tags out of S (interference tags) that are identified, u ¼ jUj, U \ S ¼ ;. Then, ¼ u uþm. The smaller the value of , the lower the misreading ratio. Fig. 1. Identify the tags in the specified area. YIN ET AL.: FOCUS AND SHOOT: EXPLORING AUTO-FOCUS IN RFID TAG IDENTIFICATION TOWARDS A SPECIFIED AREA 889����