点击下载:兰州交通大学:《机电传动控制》课程教学资源(课件讲稿,打印版)第十一章 步进电动机控制系统
正在加载图片...
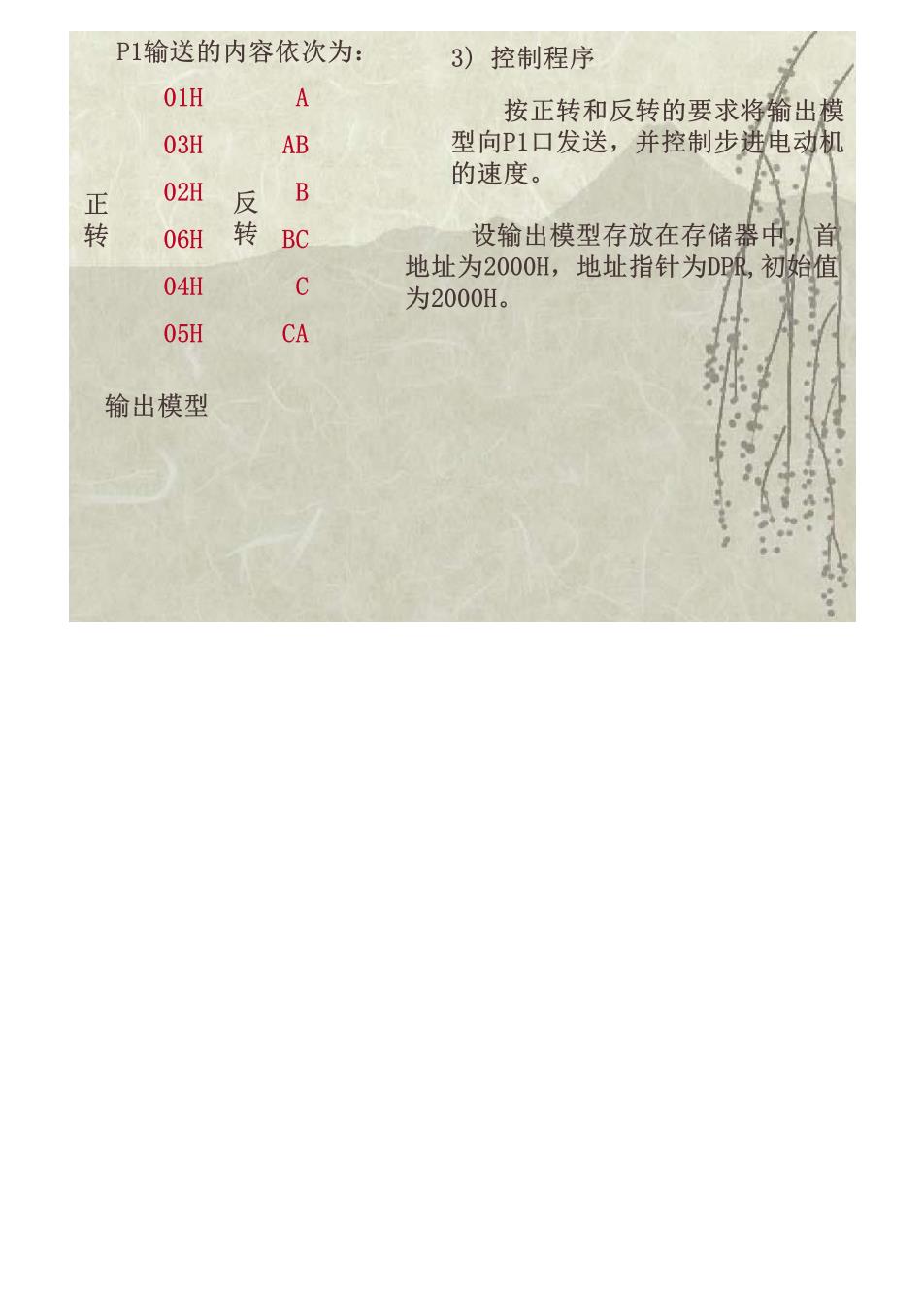
P1输送的内容依次为: 3)控制程序 01H A 按正转和反转的要求将输出模 03H AB 型向P1口发送,并控制步进电动机 的速度。 正 02H 反 B 06H转BC 设输出模型存放在存储器中,首 地址为2000H,地址指针为DPR,初始值 04H 为2000H。 05H CA 输出模型
<<向上翻页
向下翻页>>
点击下载:兰州交通大学:《机电传动控制》课程教学资源(课件讲稿,打印版)第十一章 步进电动机控制系统
©2008-现在 cucdc.com 高等教育资讯网 版权所有