正在加载图片...
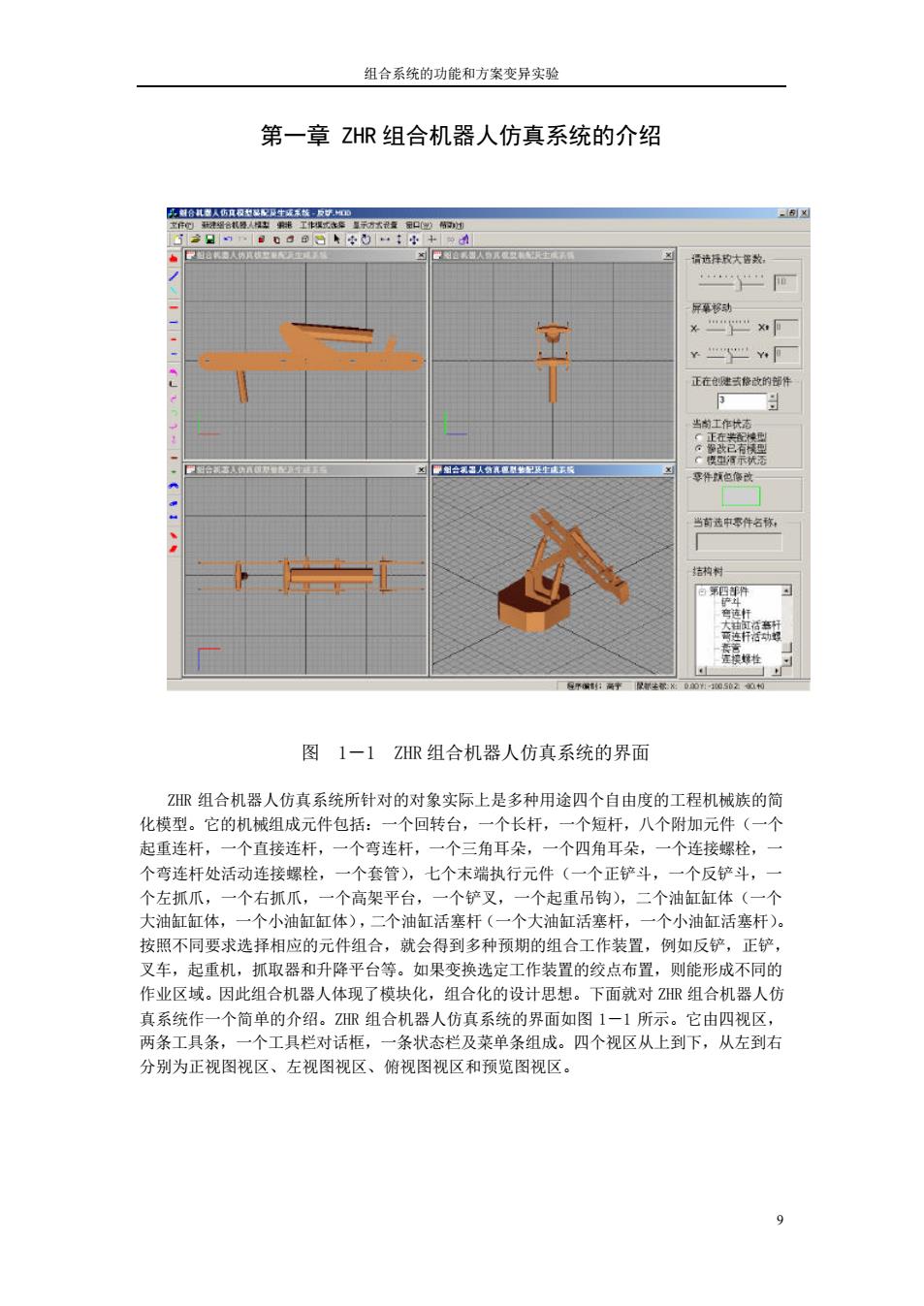
组合系统的功能和方案变异实验 第一章ZHR组合机器人仿真系统的介绍 3 人 萄选中件名 图1一1ZR组合机器人仿真系统的界面 R组合机器人仿真系统所针对的对象实际上是多种用途四个自由度的工程机械族的简 化模型。它的机械组成元件包括:一个回转台,一个长杆, 一个短杆,八个附加元件(一个 起重连杆,一个直接连杆,一个弯连杆,一个三角耳朵,一个四角耳朵,一个连接螺栓。 个弯连杆处活动连接螺栓,一个套管),七个末端执行元件(一个正铲斗,一个反铲斗, 个左抓爪,一个右抓爪,一个高架平台,一个铲叉,一个起重吊钩),二个油缸缸体(一个 大油缸缸体,一个小油缸缸体),二个油缸活塞杆(一个大油缸活塞杆,一个小油缸活塞杆)。 按照不同要求洗择相应的元件组合,就会得到多种预期的组合工作梦置,例加反铲,正铲, 叉车,起重机,抓取器和升降平台等。如果变换选定工作装置的纹点布置,则能形成不 作业区域。因此组合机器人体现了模块化,组合化的设计思想。下面就对ZR组合机器人仿 真系统作一个简单的介绍。R组合机器人仿真系统的界面如图1一1所示。它由四视区, 两条工具条,一个工具栏对话框,一条状态栏及菜单条组成。四个视区从上到下,从左到右 分别为正视图视风、左视图视风、俯视图视区和预监图视区。组合系统的功能和方案变异实验 9 第一章 ZHR 组合机器人仿真系统的介绍 图 1-1 ZHR 组合机器人仿真系统的界面 ZHR 组合机器人仿真系统所针对的对象实际上是多种用途四个自由度的工程机械族的简 化模型。它的机械组成元件包括:一个回转台,一个长杆,一个短杆,八个附加元件(一个 起重连杆,一个直接连杆,一个弯连杆,一个三角耳朵,一个四角耳朵,一个连接螺栓,一 个弯连杆处活动连接螺栓,一个套管),七个末端执行元件(一个正铲斗,一个反铲斗,一 个左抓爪,一个右抓爪,一个高架平台,一个铲叉,一个起重吊钩),二个油缸缸体(一个 大油缸缸体,一个小油缸缸体),二个油缸活塞杆(一个大油缸活塞杆,一个小油缸活塞杆)。 按照不同要求选择相应的元件组合,就会得到多种预期的组合工作装置,例如反铲,正铲, 叉车,起重机,抓取器和升降平台等。如果变换选定工作装置的绞点布置,则能形成不同的 作业区域。因此组合机器人体现了模块化,组合化的设计思想。下面就对 ZHR 组合机器人仿 真系统作一个简单的介绍。ZHR 组合机器人仿真系统的界面如图 1-1 所示。它由四视区, 两条工具条,一个工具栏对话框,一条状态栏及菜单条组成。四个视区从上到下,从左到右 分别为正视图视区、左视图视区、俯视图视区和预览图视区