正在加载图片...
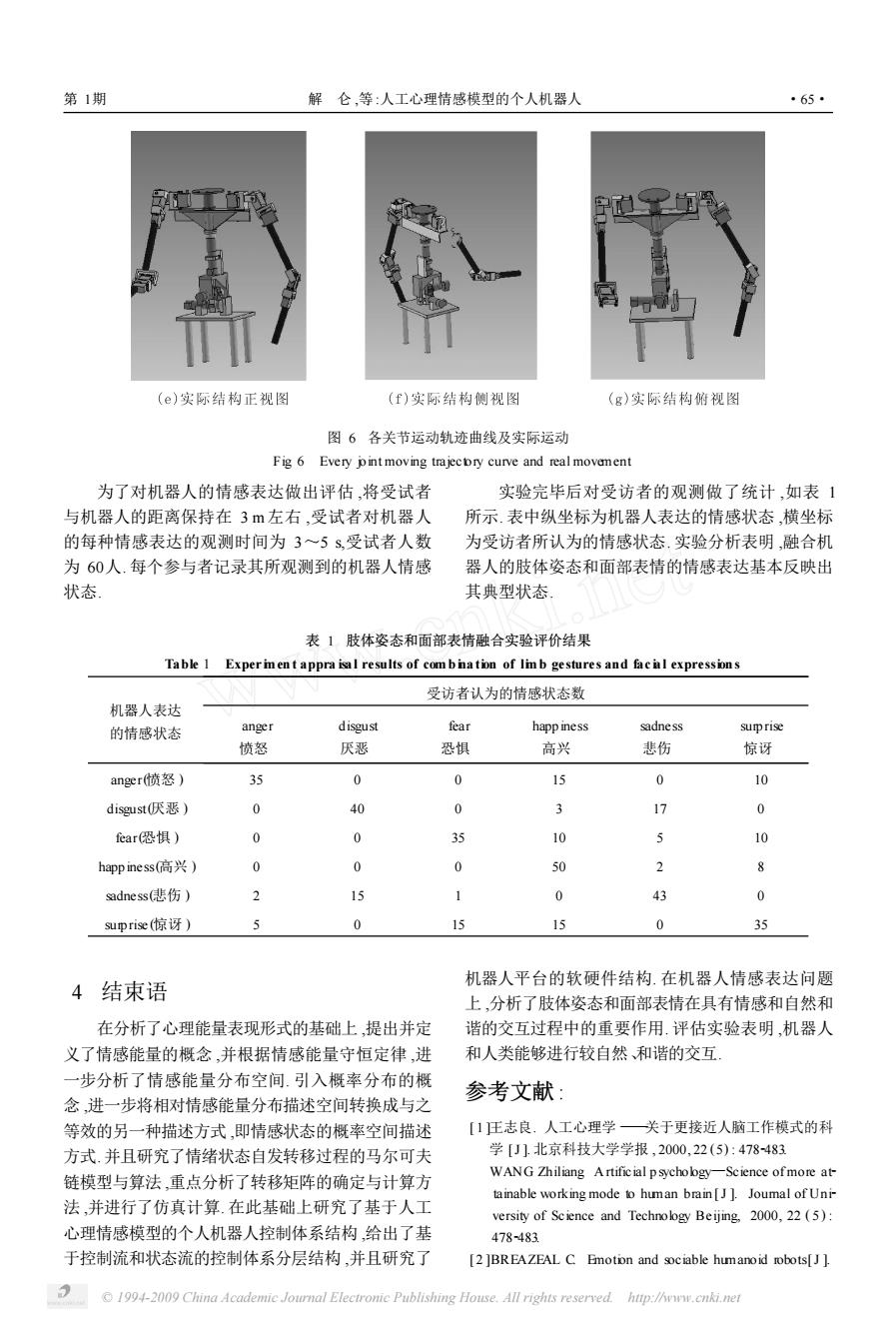
第1期 解仑,等:人工心理情感模型的个人机器人 ·65. (e)实际结构正视图 (f)实际结构侧视图 (g)实际结构俯视图 图6各关节运动轨迹曲线及实际运动 Fig 6 Every pint moving trajecpry curve and real movement 为了对机器人的情感表达做出评估,将受试者 实验完毕后对受访者的观测做了统计,如表1 与机器人的距离保持在3m左右,受试者对机器人 所示.表中纵坐标为机器人表达的情感状态,横坐标 的每种情感表达的观测时间为3~5s,受试者人数 为受访者所认为的情感状态.实验分析表明,融合机 为60人.每个参与者记录其所观测到的机器人情感 器人的肢体姿态和面部表情的情感表达基本反映出 状态 其典型状态」 表1肢体姿态和面部表情融合实验评价结果 Table 1 Exper ient appra isal results of com bnation of lib gestures and facil expressions 受访者认为的情感状态数 机器人表达 的情感状态 anger disgust fear happ iness sadness surprise 愤怒 厌恶 恐惧 高兴 悲伤 惊讶 anger(愤怒)】 35 0 0 15 0 10 disgust(厌恶) 0 40 0 3 17 0 fear恐惧) 0 35 10 5 10 happiness(高兴) 0 0 0 50 2 8 sadness(患伤) 15 1 0 43 0 suprise(惊讶) 0 15 尔 0 35 机器人平台的软硬件结构.在机器人情感表达问题 4结束语 上,分析了肢体姿态和面部表情在具有情感和自然和 在分析了心理能量表现形式的基础上,提出并定 谐的交互过程中的重要作用.评估实验表明,机器人 义了情感能量的概念,并根据情感能量守恒定律,进 和人类能够进行较自然和谐的交互 一步分析了情感能量分布空间.引入概率分布的概 参考文献: 念,进一步将相对情感能量分布描述空间转换成与之 等效的另一种描述方式,即情感状态的概率空间描述 [1正志良.人工心理学一关于更接近人脑工作模式的科 方式.并且研究了情绪状态自发转移过程的马尔可夫 学[J]北京科技大学学报,2000,22(5):478483 链模型与算法,重点分析了转移矩阵的确定与计算方 WANG Zhiliang Artificial psychobgy-Science ofmore at- tainable working mode o human brain[J].Joumal of Uni- 法,并进行了仿真计算.在此基础上研究了基于人工 versity of Science and Technology Beijing.2000,22(5): 心理情感模型的个人机器人控制体系结构,给出了基 478-483. 于控制流和状态流的控制体系分层结构,并且研究了 [2 ]BREAZEAL C Eotion and sociable humanoid robots[J ] 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.htp://www.cnki.net图 6 各关节运动轨迹曲线及实际运动 Fig. 6 Every joint moving trajectory curve and real movement 为了对机器人的情感表达做出评估 ,将受试者 与机器人的距离保持在 3 m左右 ,受试者对机器人 的每种情感表达的观测时间为 3~5 s,受试者人数 为 60人. 每个参与者记录其所观测到的机器人情感 状态. 实验完毕后对受访者的观测做了统计 ,如表 1 所示. 表中纵坐标为机器人表达的情感状态 ,横坐标 为受访者所认为的情感状态. 实验分析表明 ,融合机 器人的肢体姿态和面部表情的情感表达基本反映出 其典型状态. 表 1 肢体姿态和面部表情融合实验评价结果 Table 1 Exper im en t appra isa l results of com b ina tion of lim b gestures and fac ia l expression s 机器人表达 的情感状态 受访者认为的情感状态数 anger 愤怒 disgust 厌恶 fear 恐惧 happ iness 高兴 sadness 悲伤 surp rise 惊讶 anger(愤怒 ) 35 0 0 15 0 10 disgust(厌恶 ) 0 40 0 3 17 0 fear(恐惧 ) 0 0 35 10 5 10 happ iness(高兴 ) 0 0 0 50 2 8 sadness(悲伤 ) 2 15 1 0 43 0 surp rise (惊讶 ) 5 0 15 15 0 35 4 结束语 在分析了心理能量表现形式的基础上 ,提出并定 义了情感能量的概念 ,并根据情感能量守恒定律 ,进 一步分析了情感能量分布空间. 引入概率分布的概 念 ,进一步将相对情感能量分布描述空间转换成与之 等效的另一种描述方式 ,即情感状态的概率空间描述 方式.并且研究了情绪状态自发转移过程的马尔可夫 链模型与算法 ,重点分析了转移矩阵的确定与计算方 法 ,并进行了仿真计算. 在此基础上研究了基于人工 心理情感模型的个人机器人控制体系结构 ,给出了基 于控制流和状态流的控制体系分层结构 ,并且研究了 机器人平台的软硬件结构. 在机器人情感表达问题 上 ,分析了肢体姿态和面部表情在具有情感和自然和 谐的交互过程中的重要作用. 评估实验表明 ,机器人 和人类能够进行较自然、和谐的交互. 参考文献 : [ 1 ]王志良. 人工心理学 ———关于更接近人脑工作模式的科 学 [J ]. 北京科技大学学报 , 2000, 22 (5) : 4782483. WANG Zhiliang. A rtificial p sychology—Science of more at2 tainable working mode to human brain [J ]. Journal of Uni2 versity of Science and Technology Beijing, 2000, 22 ( 5 ) : 4782483. [ 2 ]BREAZEAL C. Emotion and sociable humanoid robots[J ]. 第 1期 解 仑 ,等 :人工心理情感模型的个人机器人 ·65· © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net