正在加载图片...
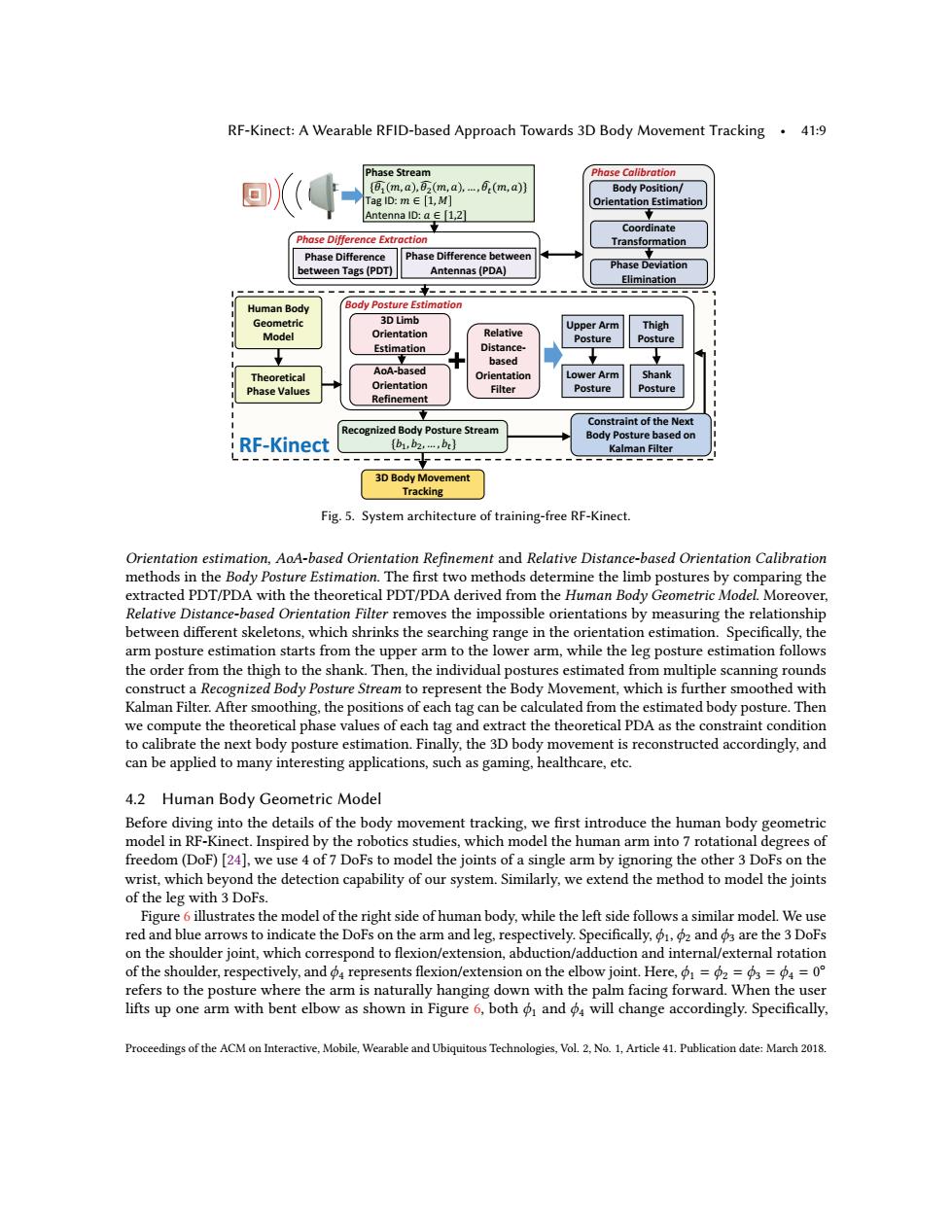
RF-Kinect:A Wearable RFID-based Approach Towards 3D Body Movement Tracking.41:9 Phase Stream Phase Calibration {⑥1(m,a),6(m,a).,6(m,a)】 Body Position/ Tag ID:m∈[1,M] Orientation Estimation Antenna ID:a E [1,2] 盲 Coordinate Phase Difference Extraction Transformation Phase Difference Phase Difference between between Tags(PDT) Antennas(PDA) Phase Deviation Elimination Human Body Body Posture Estimation Geometric 3DLmb Upper Arm Thigh Model Orientation Relative Posture Posture Estimation Distance- 官 based Theoretical AoA-based Orientation Lower Arm Shank Phase Values Orientation Filter Posture Posture Refinement Constraint of the Next Recognized Body Posture Stream Body Posture based on RF-Kinect {b,b2,-,b) Kalman Filter ----------- 3D Body Movement Tracking Fig.5.System architecture of training-free RF-Kinect. Orientation estimation,AoA-based Orientation Refinement and Relative Distance-based Orientation Calibration methods in the Body Posture Estimation.The first two methods determine the limb postures by comparing the extracted PDT/PDA with the theoretical PDT/PDA derived from the Human Body Geometric Model.Moreover. Relative Distance-based Orientation Filter removes the impossible orientations by measuring the relationship between different skeletons,which shrinks the searching range in the orientation estimation.Specifically,the arm posture estimation starts from the upper arm to the lower arm,while the leg posture estimation follows the order from the thigh to the shank.Then,the individual postures estimated from multiple scanning rounds construct a Recognized Body Posture Stream to represent the Body Movement,which is further smoothed with Kalman Filter.After smoothing,the positions of each tag can be calculated from the estimated body posture.Then we compute the theoretical phase values of each tag and extract the theoretical PDA as the constraint condition to calibrate the next body posture estimation.Finally,the 3D body movement is reconstructed accordingly,and can be applied to many interesting applications,such as gaming,healthcare,etc. 4.2 Human Body Geometric Model Before diving into the details of the body movement tracking,we first introduce the human body geometric model in RF-Kinect.Inspired by the robotics studies,which model the human arm into 7 rotational degrees of freedom(DoF)[24].we use 4 of 7 DoFs to model the joints of a single arm by ignoring the other 3 DoFs on the wrist,which beyond the detection capability of our system.Similarly,we extend the method to model the joints of the leg with 3 DoFs. Figure 6 illustrates the model of the right side of human body,while the left side follows a similar model.We use red and blue arrows to indicate the DoFs on the arm and leg.respectively.Specifically,,2 and 3 are the 3 DoFs on the shoulder joint,which correspond to flexion/extension,abduction/adduction and internal/external rotation of the shoulder,respectively,and represents flexion/extension on the elbow joint.Here,=2=3==0 refers to the posture where the arm is naturally hanging down with the palm facing forward.When the user lifts up one arm with bent elbow as shown in Figure 6,both o and will change accordingly.Specifically, Proceedings of the ACM on Interactive,Mobile,Wearable and Ubiquitous Technologies,Vol.2,No.1,Article 41.Publication date:March 2018.RF-Kinect: A Wearable RFID-based Approach Towards 3D Body Movement Tracking • 41:9 !"#$ %"&'('")* +,'-)(.('") /&('0.('") 123!"#$ 4"5-0-)( 6,.78')9 %:.&- 2-5'.('") /;'0').('") !"#$% &'((%)%*+% ,-.)#+.'/* %:.&- 2'<<-,-)7- =-(>--) 6.9& ?%26@ %:.&- 2'<<-,-)7- =-(>--) A)(-)).& ?%2A@ B-7"9)'C-# !"#$ %"&(D,- E(,-.0 !"#$ "%$ & $ "'( F")&(,.')(3"<3(:-3G-H(3 !"#$3%"&(D,-3=.&-#3")3 I.;0.) J';(-, %:.&- E(,-.0 !"#$%01#2'3)#.'/* !)*# +$ , $ )*% +$ , $ & $ )' - .+$ ,/( !"# $%& + 0 1$ 2 '()*((" $%& , 0 31$45 A"AK=.&-# +,'-)(.('") B-<')-0-)( LMM-, A,0 %"&(D,- N">-, A,0 %"&(D,- 4/56 !/$.7)% ,$.'8#.'/* BJKI')-7( OD0.) !"#$ P-"0-(,'73 4"#-; F"",#').(- 6,.)&<",0.('") 6:'9: %"&(D,- E:.)8 %"&(D,- 6:-",-('7.; %:.&- Q.;D-& 12 N'0= +,'-)(.('") /&('0.('") B-;.('5- 2'&(.)7-K =.&-# +,'-)(.('") J';(-, Fig. 5. System architecture of training-free RF-Kinect. Orientation estimation, AoA-based Orientation Refinement and Relative Distance-based Orientation Calibration methods in the Body Posture Estimation. The first two methods determine the limb postures by comparing the extracted PDT/PDA with the theoretical PDT/PDA derived from the Human Body Geometric Model. Moreover, Relative Distance-based Orientation Filter removes the impossible orientations by measuring the relationship between different skeletons, which shrinks the searching range in the orientation estimation. Specifically, the arm posture estimation starts from the upper arm to the lower arm, while the leg posture estimation follows the order from the thigh to the shank. Then, the individual postures estimated from multiple scanning rounds construct a Recognized Body Posture Stream to represent the Body Movement, which is further smoothed with Kalman Filter. After smoothing, the positions of each tag can be calculated from the estimated body posture. Then we compute the theoretical phase values of each tag and extract the theoretical PDA as the constraint condition to calibrate the next body posture estimation. Finally, the 3D body movement is reconstructed accordingly, and can be applied to many interesting applications, such as gaming, healthcare, etc. 4.2 Human Body Geometric Model Before diving into the details of the body movement tracking, we first introduce the human body geometric model in RF-Kinect. Inspired by the robotics studies, which model the human arm into 7 rotational degrees of freedom (DoF) [24], we use 4 of 7 DoFs to model the joints of a single arm by ignoring the other 3 DoFs on the wrist, which beyond the detection capability of our system. Similarly, we extend the method to model the joints of the leg with 3 DoFs. Figure 6 illustrates the model of the right side of human body, while the left side follows a similar model. We use red and blue arrows to indicate the DoFs on the arm and leg, respectively. Specifically, ϕ1, ϕ2 and ϕ3 are the 3 DoFs on the shoulder joint, which correspond to flexion/extension, abduction/adduction and internal/external rotation of the shoulder, respectively, and ϕ4 represents flexion/extension on the elbow joint. Here, ϕ1 = ϕ2 = ϕ3 = ϕ4 = 0 ◦ refers to the posture where the arm is naturally hanging down with the palm facing forward. When the user lifts up one arm with bent elbow as shown in Figure 6, both ϕ1 and ϕ4 will change accordingly. Specifically, Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, Vol. 2, No. 1, Article 41. Publication date: March 2018