正在加载图片...
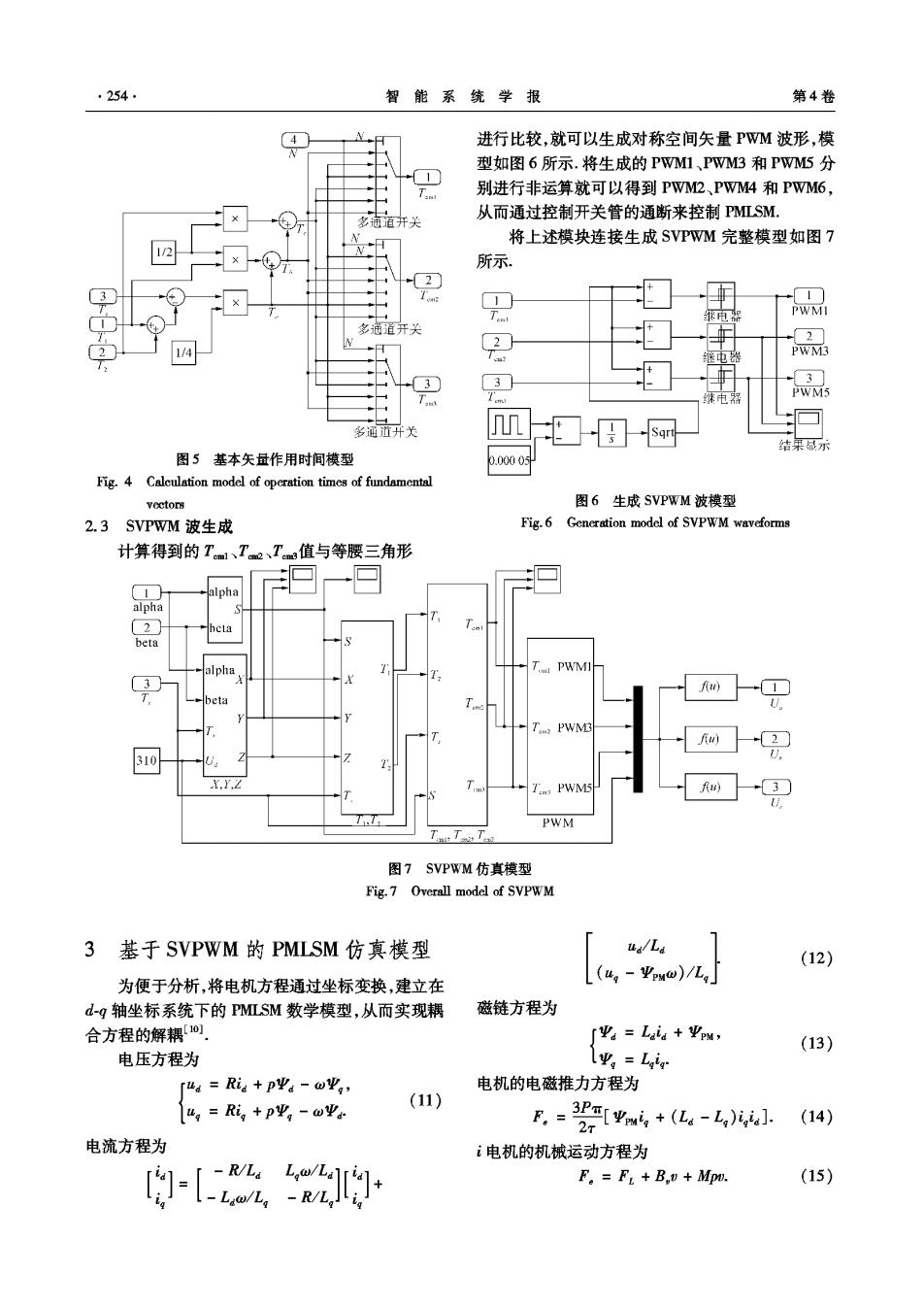
,254. 智能系统学报 第4卷 4 进行比较,就可以生成对称空间矢量PWM波形,模 型如图6所示.将生成的PWM1、PWM3和PWML5分 别进行非运算就可以得到PWM2、PWM4和PWM6, 从而通过控制开关管的通断来控制PMLSM. 多通道并关 将上述模块连接生成SVPWM完整模型如图7 1/2 tT. 所示 1 继屯器 PWMI 多通道开关 2 14 2 中 T 继屯器 PWM3 31 3 辣电器 PWM5 多通道开关 结果最示 图5基本矢量作用时间模型 0.00005 Fig.4 Calculation model of operation times of fundamental vectors 图6生成SVPWM波模型 2.3 SVPWM波生成 Fig.6 Generation model of SVPWM waveforms 计算得到的Tm1、T2、T值与等腰三角形 1 lpha alpha 2 cla beta alpha 3 Au) 1 eta PWM3 2 310 Y.YZ PWM5 3 PWM 图7 SVPWM仿真模型 Fig.7 Overall model of SVPWM 3基于SVPWM的PMLSM仿真模型 ud/La 1 (12) 为便于分析,将电机方程通过坐标变换,建立在 L(,-w)/L,j d-g轴坐标系统下的PMLSM数学模型,从而实现耦 磁链方程为 合方程的解耦0, r里a=Laia+Ψw, (13) 电压方程为 lΨg=Lgg rwa=Ria+p业。-ωΨg; 电机的电磁推力方程为 (11) g=Rig+p乎,-ωΨ R=,+山-4yi1 (14) 电流方程为 电机的机械运动方程为 - F。=FE+B,+Mpm. (15)