正在加载图片...
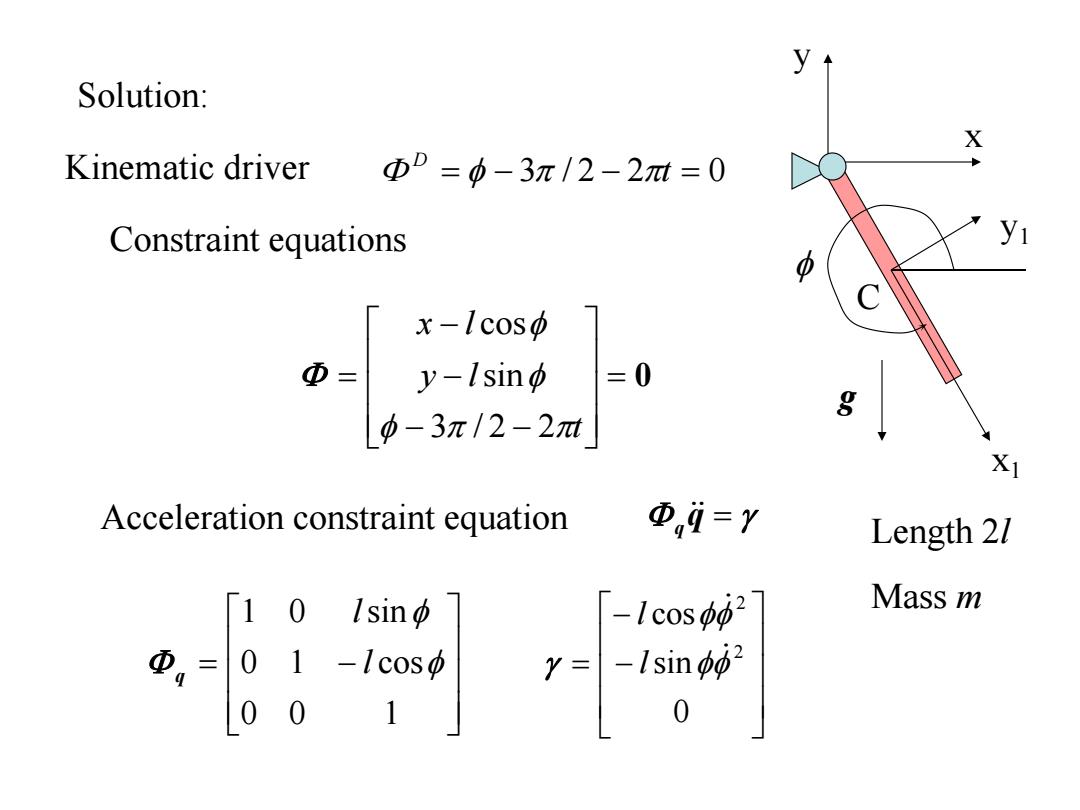
Solution: X Kinematic driver ΦD=p-3π/2-2t=0 Constraint equations 中 x-1cos Φ= y-lsinφ =0 g φ-3π/2-2t Xi Acceleration constraint equation Φ,i=y Length 27 101sinφ -Icosoo2 Mass m y=-Isin2 0Solution: 0 t y l x l 3 / 2 2 sin cos 0 0 1 0 1 cos 1 0 sin l l q 0 sin cos 2 2 l l 3 / 2 2 t 0 D Kinematic driver Constraint equations Acceleration constraint equation q q x1 y1 C x y g Length 2l Mass m