正在加载图片...
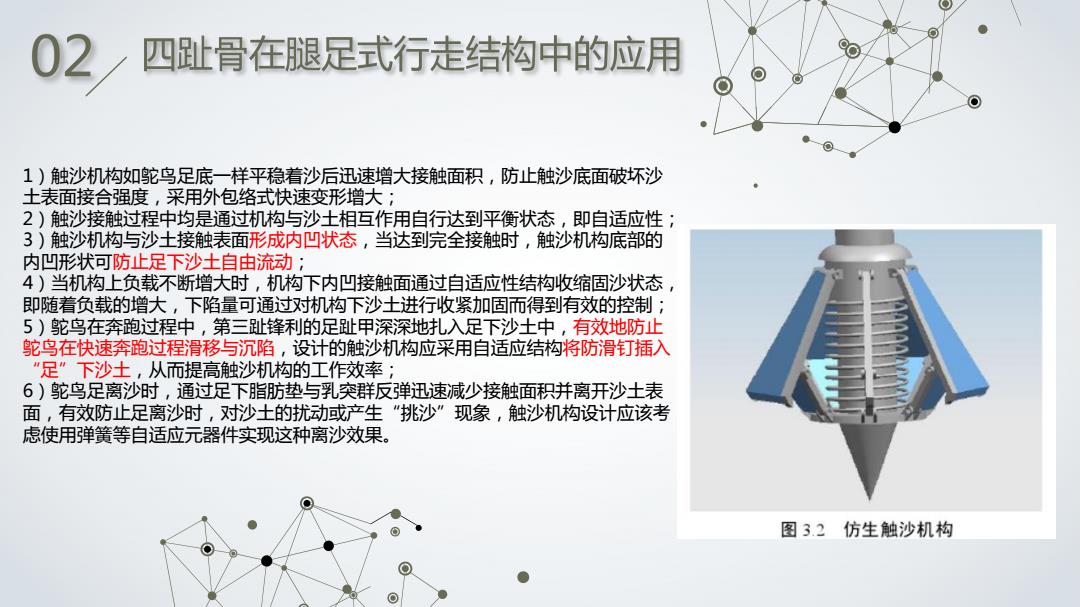
02 四趾骨在腿足式行走结构中的应用 1)触沙机构如鸵鸟足底一样平稳着沙后迅速增大接触面积,防止触沙底面破坏沙 土表面接合强度,采用外包络式快速变形增大; 2)触沙接触过程中均是通过机构与沙土相互作用自行达到平衡状态,即自适应性; 3)触沙机构与沙土接触表面形成内凹状态,当达到完全接触时,触沙机构底部的 内凹形状可防止足下沙土自由流动; 4)当机构上负载不断增大时,机构下内凹接触面通过自适应性结构收缩固沙状态, 即随着负载的增大,下陷量可通过对机构下沙土进行收紧加固而得到有效的控制; 5)鸵鸟在奔跑过程中,第三趾锋利的足趾甲深深地扎入足下沙士中,有效地防止 鸵鸟在快速奔跑过程滑移与沉陷,设计的触沙机构应采用自适应结构将防滑钉插入 "“足”下沙士,从而提高触沙机构的工作效率; 6)鸵鸟足离沙时,通过足下脂肪垫与乳突群反弹迅速减少接触面积并离开沙土表 面,有效防止足离沙时,对沙土的扰动或产生“挑沙”现象,触沙机构设计应该考 虑使用弹簧等自适应元器件实现这种离沙效果。 图3.2仿生触沙机构 0 0感谢您下载包图网平台上提供的PPT作品,为了您和包图网以及原创作者的利益,请勿复制、传播、销售,否则将承担法律责任!包图网将对作品进行维权,按照传播下载次数进行十倍的索取赔偿! ibaotu.com 1)触沙机构如鸵鸟足底一样平稳着沙后迅速增大接触面积,防止触沙底面破坏沙 土表面接合强度,采用外包络式快速变形增大; 2)触沙接触过程中均是通过机构与沙土相互作用自行达到平衡状态,即自适应性; 3)触沙机构与沙土接触表面形成内凹状态,当达到完全接触时,触沙机构底部的 内凹形状可防止足下沙土自由流动; 4)当机构上负载不断增大时,机构下内凹接触面通过自适应性结构收缩固沙状态, 即随着负载的增大,下陷量可通过对机构下沙土进行收紧加固而得到有效的控制; 5)鸵鸟在奔跑过程中,第三趾锋利的足趾甲深深地扎入足下沙土中,有效地防止 鸵鸟在快速奔跑过程滑移与沉陷,设计的触沙机构应采用自适应结构将防滑钉插入 “足”下沙土,从而提高触沙机构的工作效率; 6)鸵鸟足离沙时,通过足下脂肪垫与乳突群反弹迅速减少接触面积并离开沙土表 面,有效防止足离沙时,对沙土的扰动或产生“挑沙”现象,触沙机构设计应该考 虑使用弹簧等自适应元器件实现这种离沙效果