正在加载图片...
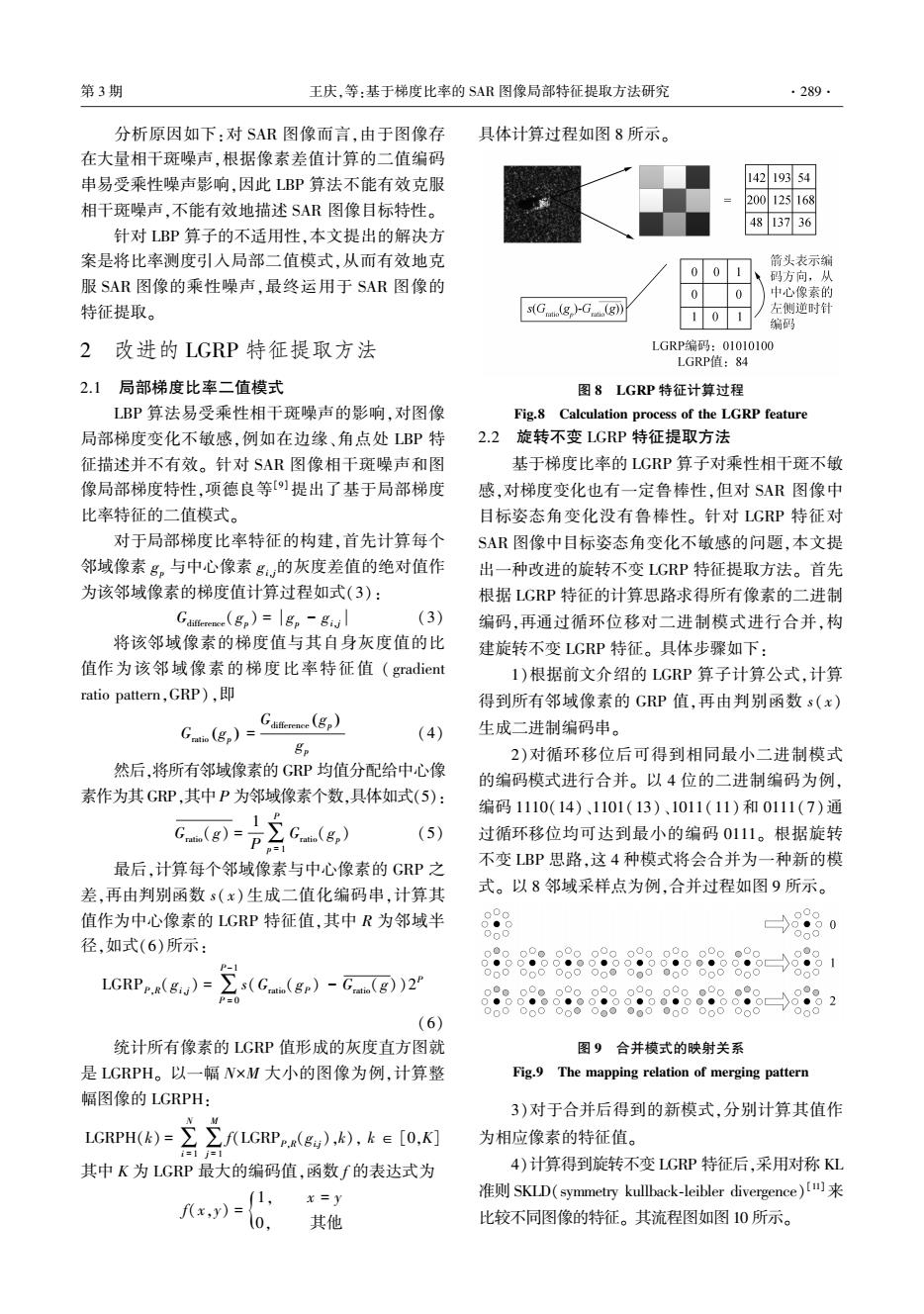
第3期 王庆,等:基于梯度比率的SAR图像局部特征提取方法研究 ·289. 分析原因如下:对SAR图像而言,由于图像存 具体计算过程如图8所示。 在大量相干斑噪声,根据像素差值计算的二值编码 串易受乘性噪声影响,因此LBP算法不能有效克服 14219354 相干斑噪声,不能有效地描述SAR图像目标特性。 200125168 4813736 针对LBP算子的不适用性,本文提出的解决方 案是将比率测度引入局部二值模式,从而有效地克 箭头表示编 0 码方向,从 服SAR图像的乘性噪声,最终运用于SAR图像的 中心像素的 特征提取。 s(G(g)-G(g)) 左侧逆时针 0 编码 2改进的LGRP特征提取方法 LGRP编码:01010100 LGRP值:84 2.1局部梯度比率二值模式 图8LGRP特征计算过程 LBP算法易受乘性相干斑噪声的影响,对图像 Fig.8 Calculation process of the LGRP feature 局部梯度变化不敏感,例如在边缘、角点处LBP特 2.2旋转不变LGRP特征提取方法 征描述并不有效。针对SAR图像相干斑噪声和图 基于梯度比率的LGRP算子对乘性相干斑不敏 像局部梯度特性,项德良等]提出了基于局部梯度 感,对梯度变化也有一定鲁棒性,但对SAR图像中 比率特征的二值模式。 目标姿态角变化没有鲁棒性。针对LGRP特征对 对于局部梯度比率特征的构建,首先计算每个 SAR图像中目标姿态角变化不敏感的问题,本文提 邻域像素g。与中心像素g,的灰度差值的绝对值作 出一种改进的旋转不变LGRP特征提取方法。首先 为该邻域像素的梯度值计算过程如式(3): 根据LGRP特征的计算思路求得所有像素的二进制 Gih(8n)=lg。-gdl (3) 编码,再通过循环位移对二进制模式进行合并,构 将该邻域像素的梯度值与其自身灰度值的比 建旋转不变LGRP特征。具体步骤如下: 值作为该邻域像素的梯度比率特征值(gradient 1)根据前文介绍的LGRP算子计算公式,计算 ratio pattern,GRP),即 得到所有邻域像素的GRP值,再由判别函数s(x) Gm(gp)=- dfterence(gp) (4) 生成二进制编码串。 Ep 2)对循环移位后可得到相同最小二进制模式 然后,将所有邻域像素的GP均值分配给中心像 的编码模式进行合并。以4位的二进制编码为例, 素作为其GRP,其中P为邻域像素个数,具体如式(5): 编码1110(14)、1101(13)、1011(11)和0111(7)通 三6 Gnn(g)= (5) 过循环移位均可达到最小的编码0111。根据旋转 最后,计算每个邻域像素与中心像素的GRP之 不变LBP思路,这4种模式将会合并为一种新的模 差,再由判别函数s(x)生成二值化编码串,计算其 式。以8邻域采样点为例,合并过程如图9所示。 值作为中心像素的LGRP特征值,其中R为邻域半 →8880 径,如式(6)所示: 000000 LGRPP.R(gi)= (G)(2 =0 (6) 统计所有像素的LGRP值形成的灰度直方图就 图9合并模式的映射关系 是LGRPH。以一幅N×M大小的图像为例,计算整 Fig.9 The mapping relation of merging pattern 幅图像的LGRPH: 3)对于合并后得到的新模式,分别计算其值作 LGRPH()= 立RLCRP,,ke[o, 为相应像素的特征值。 其中K为LGRP最大的编码值,函数f的表达式为 4)计算得到旋转不变LGRP特征后,采用对称KL fx,y)=0. x=y 准则SKLD(symmetry kullback-leibler divergence)[来 其他 比较不同图像的特征。其流程图如图10所示。分析原因如下:对 SAR 图像而言,由于图像存 在大量相干斑噪声,根据像素差值计算的二值编码 串易受乘性噪声影响,因此 LBP 算法不能有效克服 相干斑噪声,不能有效地描述 SAR 图像目标特性。 针对 LBP 算子的不适用性,本文提出的解决方 案是将比率测度引入局部二值模式,从而有效地克 服 SAR 图像的乘性噪声,最终运用于 SAR 图像的 特征提取。 2 改进的 LGRP 特征提取方法 2.1 局部梯度比率二值模式 LBP 算法易受乘性相干斑噪声的影响,对图像 局部梯度变化不敏感,例如在边缘、角点处 LBP 特 征描述并不有效。 针对 SAR 图像相干斑噪声和图 像局部梯度特性,项德良等[9] 提出了基于局部梯度 比率特征的二值模式。 对于局部梯度比率特征的构建,首先计算每个 邻域像素 gp 与中心像素 gi,j的灰度差值的绝对值作 为该邻域像素的梯度值计算过程如式(3): Gdifference(gp) = gp - gi,j (3) 将该邻域像素的梯度值与其自身灰度值的比 值作为该邻域像素的梯度比率特征值 ( gradient ratio pattern,GRP),即 Gratio gp ( ) = Gdifference gp ( ) gp (4) 然后,将所有邻域像素的 GRP 均值分配给中心像 素作为其 GRP,其中 P 为邻域像素个数,具体如式(5): Gratio(g) = 1 P∑ P p = 1 Gratio(gp) (5) 最后,计算每个邻域像素与中心像素的 GRP 之 差,再由判别函数 s( x)生成二值化编码串,计算其 值作为中心像素的 LGRP 特征值,其中 R 为邻域半 径,如式(6)所示: LGRP P,R(gi,j) = ∑ P-1 P = 0 s(Gratio(gP ) - Gratio(g))2 P (6) 统计所有像素的 LGRP 值形成的灰度直方图就 是 LGRPH。 以一幅 N×M 大小的图像为例,计算整 幅图像的 LGRPH: LGRPH(k) = ∑ N i = 1 ∑ M j = 1 f(LGRPP,R(gi.j),k), k ∈ [0,K] 其中 K 为 LGRP 最大的编码值,函数 f 的表达式为 f(x,y) = 1, x = y {0, 其他 具体计算过程如图 8 所示。 图 8 LGRP 特征计算过程 Fig.8 Calculation process of the LGRP feature 2.2 旋转不变 LGRP 特征提取方法 基于梯度比率的 LGRP 算子对乘性相干斑不敏 感,对梯度变化也有一定鲁棒性,但对 SAR 图像中 目标姿态角变化没有鲁棒性。 针对 LGRP 特征对 SAR 图像中目标姿态角变化不敏感的问题,本文提 出一种改进的旋转不变 LGRP 特征提取方法。 首先 根据 LGRP 特征的计算思路求得所有像素的二进制 编码,再通过循环位移对二进制模式进行合并,构 建旋转不变 LGRP 特征。 具体步骤如下: 1)根据前文介绍的 LGRP 算子计算公式,计算 得到所有邻域像素的 GRP 值,再由判别函数 s( x) 生成二进制编码串。 2)对循环移位后可得到相同最小二进制模式 的编码模式进行合并。 以 4 位的二进制编码为例, 编码 1110(14)、1101(13)、1011(11)和 0111(7)通 过循环移位均可达到最小的编码 0111。 根据旋转 不变 LBP 思路,这 4 种模式将会合并为一种新的模 式。 以 8 邻域采样点为例,合并过程如图 9 所示。 图 9 合并模式的映射关系 Fig.9 The mapping relation of merging pattern 3)对于合并后得到的新模式,分别计算其值作 为相应像素的特征值。 4)计算得到旋转不变 LGRP 特征后,采用对称 KL 准则 SKLD(symmetry kullback⁃leibler divergence) [11]来 比较不同图像的特征。 其流程图如图 10 所示。 第 3 期 王庆,等:基于梯度比率的 SAR 图像局部特征提取方法研究 ·289·