正在加载图片...
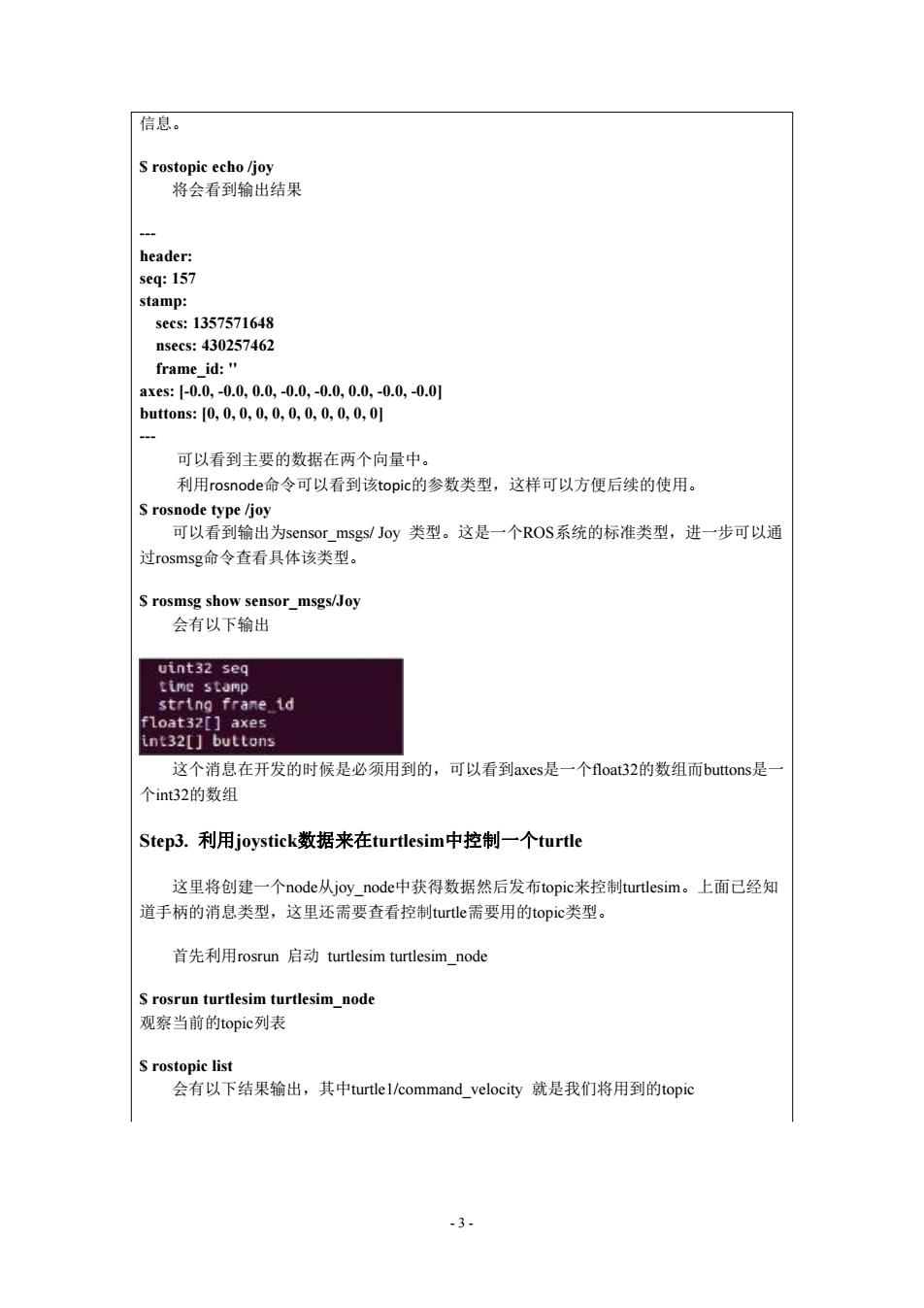
信息。 S rostopic echo /joy 将会看到输出结果 header: seq:157 stamp: secs:1357571648 nsecs::430257462 frame id:" axes:-0.0,-0.0,0.0,-0.0,-0.0,0.0-0.0,-0.01 buttons:I00,0,0,0,0,0,0,0,0,0l 可以看到主要的数据在两个向量中。 利用rosnode命令可以看到该topic的参数类型,这样可以方便后续的使用。 S rosnode type /joy 可以看到输出为sensor msgs/Joy类型。这是一个ROS系统的标准类型,进一步可以通 过rosmsg命令查看具体该类型。 S rosmsg show sensor_msgs/Joy 会有以下输出 uint32 seq time stamp string frane id float32[]axes int32[]buttons 这个消息在开发的时候是必须用到的,可以看到axes是一个float32的数组而buttons.是一 个int32的数组 Step3.利用joystick数据来在turtlesim中控制一个turtle 这里将创建一个node从joy node中获得数据然后发布topic来控制turtlesim。上面己经知 道手柄的消息类型,这里还需要查看控制turtle需要用的topic类型。 首先利用rosrun启动turtlesim turtlesim_node S rosrun turtlesim turtlesim node 观察当前的topic列表 S rostopic list 会有以下结果输出,其中turtlel/command_velocity就是我们将用到的topic -3-- 3 - 信息。 $ rostopic echo /joy 将会看到输出结果 --- header: seq: 157 stamp: secs: 1357571648 nsecs: 430257462 frame_id: '' axes: [-0.0, -0.0, 0.0, -0.0, -0.0, 0.0, -0.0, -0.0] buttons: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] --- 可以看到主要的数据在两个向量中。 利用rosnode命令可以看到该topic的参数类型,这样可以方便后续的使用。 $ rosnode type /joy 可以看到输出为sensor_msgs/ Joy 类型。这是一个ROS系统的标准类型,进一步可以通 过rosmsg命令查看具体该类型。 $ rosmsg show sensor_msgs/Joy 会有以下输出 这个消息在开发的时候是必须用到的,可以看到axes是一个float32的数组而buttons是一 个int32的数组 Step3. 利用joystick数据来在turtlesim中控制一个turtle 这里将创建一个node从joy_node中获得数据然后发布topic来控制turtlesim。上面已经知 道手柄的消息类型,这里还需要查看控制turtle需要用的topic类型。 首先利用rosrun 启动 turtlesim turtlesim_node $ rosrun turtlesim turtlesim_node 观察当前的topic列表 $ rostopic list 会有以下结果输出,其中turtle1/command_velocity 就是我们将用到的topic