正在加载图片...
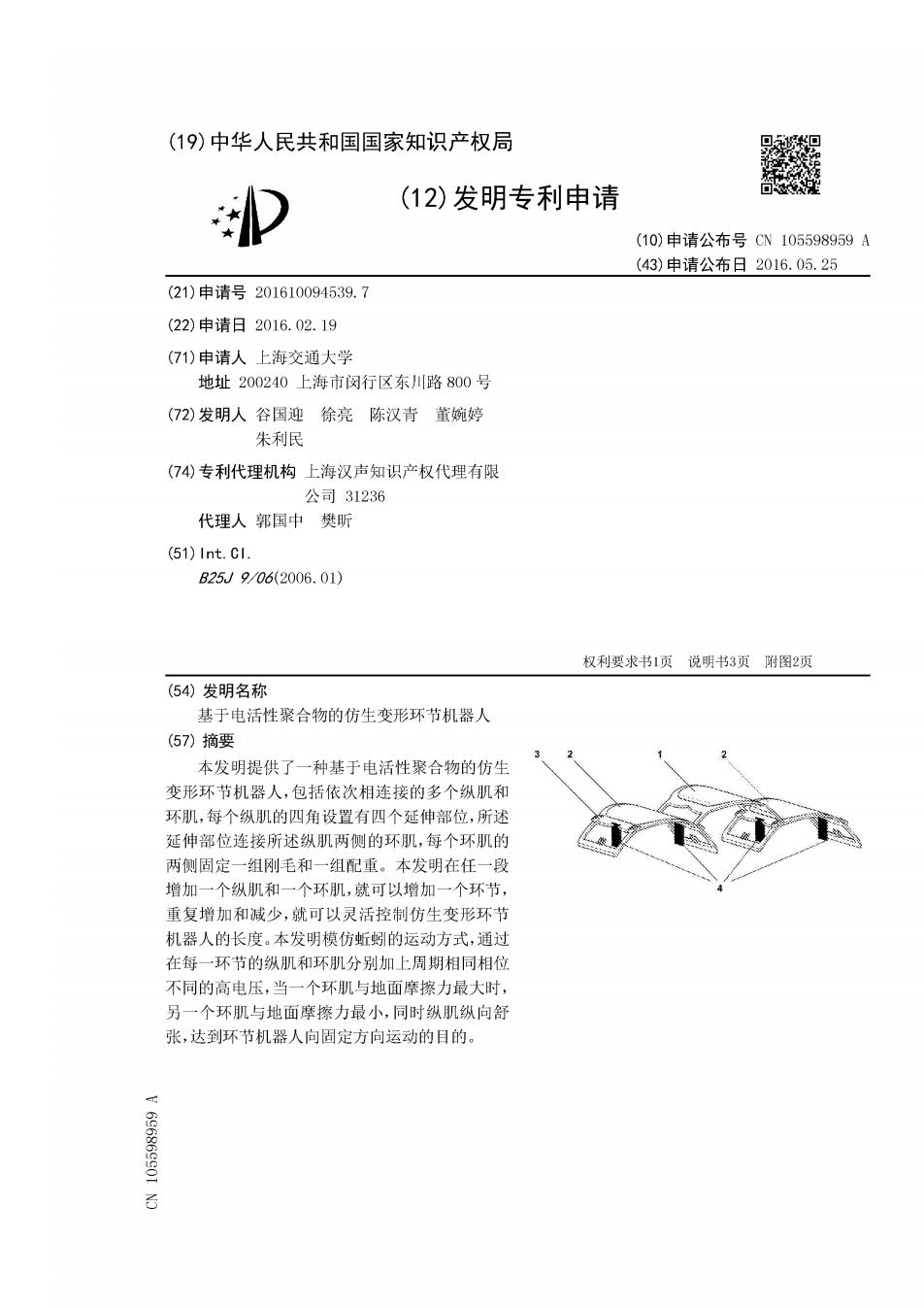
(19)中华人民共和国国家知识产权局 ▣书▣ (12)发明专利申请 (10)申请公布号CN105598959A (43)申请公布日2016.05.25 (21)申请号201610094539.7 (22)申请日2016.02.19 (71)申请人上海交通大学 地址200240上海市闵行区东川路800号 (72)发明人谷国迎徐亮 陈汉青董婉婷 朱利民 (74)专利代理机构上海汉声知识产权代理有限 公司31236 代理人郭国中樊昕 (51)nt.Cl. B25J906(2006.01) 权利要求书1页说明书3页附图2页 (54)发明名称 基于电活性聚合物的仿生变形环节机器人 (57)摘要 本发明提供了一种基于电活性聚合物的仿生 变形环节机器人,包括依次相连接的多个纵肌和 环肌,每个纵肌的四角设置有四个延伸部位,所述 延伸部位连接所述纵肌两侧的环肌,每个环肌的 两侧固定一组刚毛和一组配重。本发明在任一段 增加一个纵肌和一个环肌,就可以增加一个环节, 重复增加和减少,就可以灵活控制仿生变形环节 机器人的长度。本发明模仿蚯蚓的运动方式,通过 在每一环节的纵肌和环肌分别加上周期相同相位 不同的高电压,当一个环肌与地面摩擦力最大时, 另一个环肌与地面摩擦力最小,同时纵肌纵向舒 张,达到环节机器人向固定方向运动的目的。 999869901