正在加载图片...
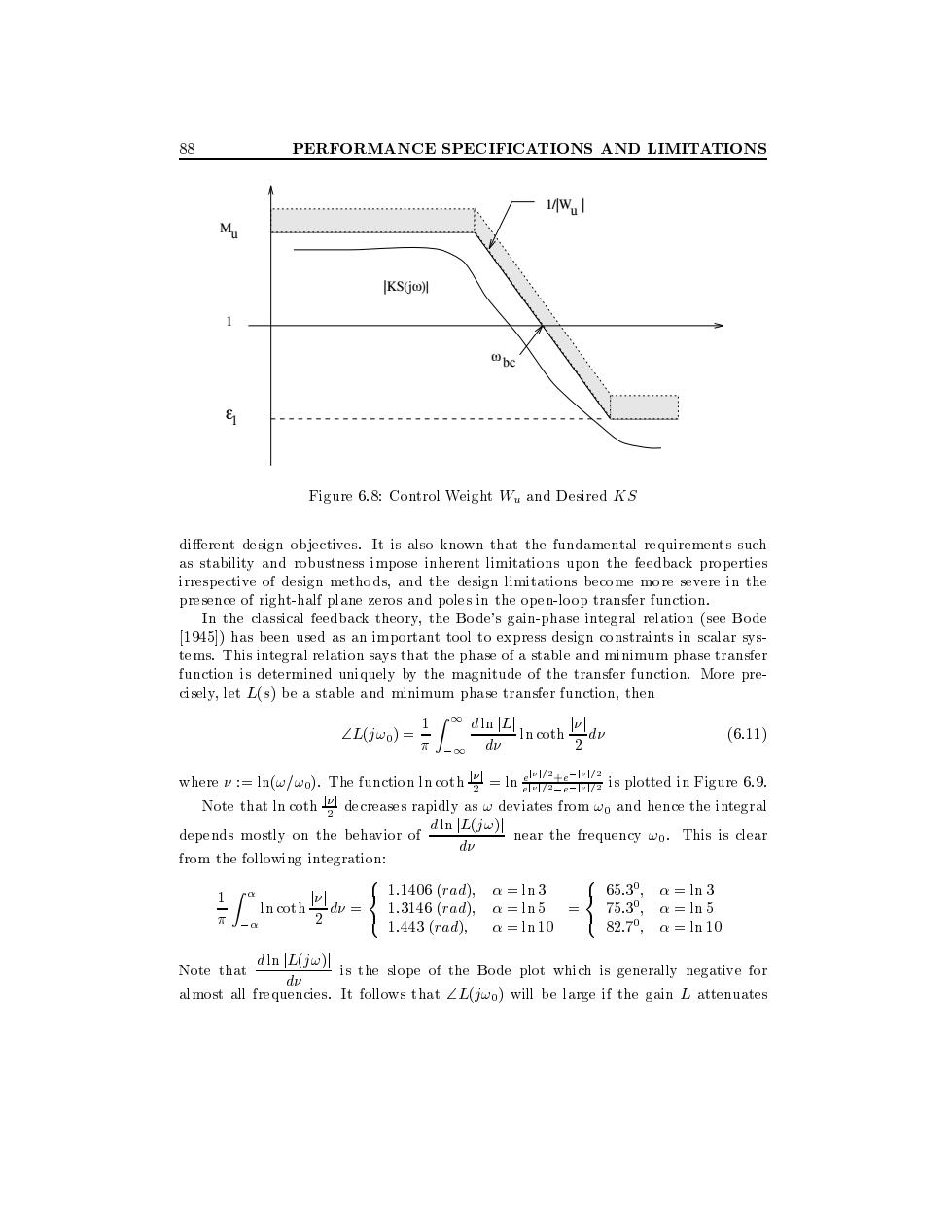
88 PERFORMANCE SPECIFICATIONS AND LIMITATIONS 1/w| u lKS(j@)l w bc Figure 6.8:Control Weight Wu and Desired KS different design objectives.It is also known that the fundamental requirements such as stability and robustness impose inherent limitations upon the feedback properties irrespective of design methods,and the design limitations become more severe in the presence of right-half plane zeros and poles in the open-loop transfer function. In the classical feedback theory,the Bode's gain-phase integral relation(see Bode [1945)has been used as an important tool to express design constraints in scalar sys- tems.This integral relation says that the phase of a stable and minimum phase transfer function is determined uniquely by the magnitude of the transfer function.More pre- cisely,let L(s)be a stable and minimum phase transfer function,then a=mw (6.11) dv 2 whe)hfanctionotIis ploted in ige.. Note that In coth decreases rapidly as w deviates from wo and hence the integral depends mostly on the behavior of din L(jw) dv near the frequency wo.This is clear from the following integration: 1.1406(rad), a=In3 65.30 a=In3 1.3146(rad, a=ln5 75.30, a =In5 1.443(rad), a=1n10 82.7°, a=In10 Note that isth ope of the Bode plot which is generally negative for almost all frequencies.It follows that L(jwo)will be large if the gain L attenuates PERFORMANCE SPECIFICATIONS AND LIMITATIONS ε bc M 1 1 u u ω 1/|W | |KS(j ω)| Figure Control Weight Wu and Desired KS dierent design ob jectives It is also known that the fundamental requirements such as stability and robustness impose inherent limitations upon the feedback properties irrespective of design methods and the design limitations become more severe in the presence of righthalf plane zeros and poles in the openloop transfer function In the classical feedback theory the Bodes gainphase integral relation see Bode
has been used as an important tool to express design constraints in scalar sys tems This integral relation says that the phase of a stable and minimum phase transfer function is determined uniquely by the magnitude of the transfer function More pre cisely let L s be a stable and minimum phase transfer function then L j
Z d ln jLj d ln coth jj d
where ln The function ln coth jj ln e jjejj ejjejj is plotted in Figure
Note that ln coth jj decreases rapidly as deviates from and hence the integral depends mostly on the behavior of d ln jL jj d near the frequency This is clear from the following integration
Z ln coth jj d
rad ln
rad ln
rad ln
ln ln ln
Note that d ln jL jj d is the slope of the Bode plot which is generally negative for almost all frequencies It follows that L j will be large if the gain L attenuates������������������������������������������������