正在加载图片...
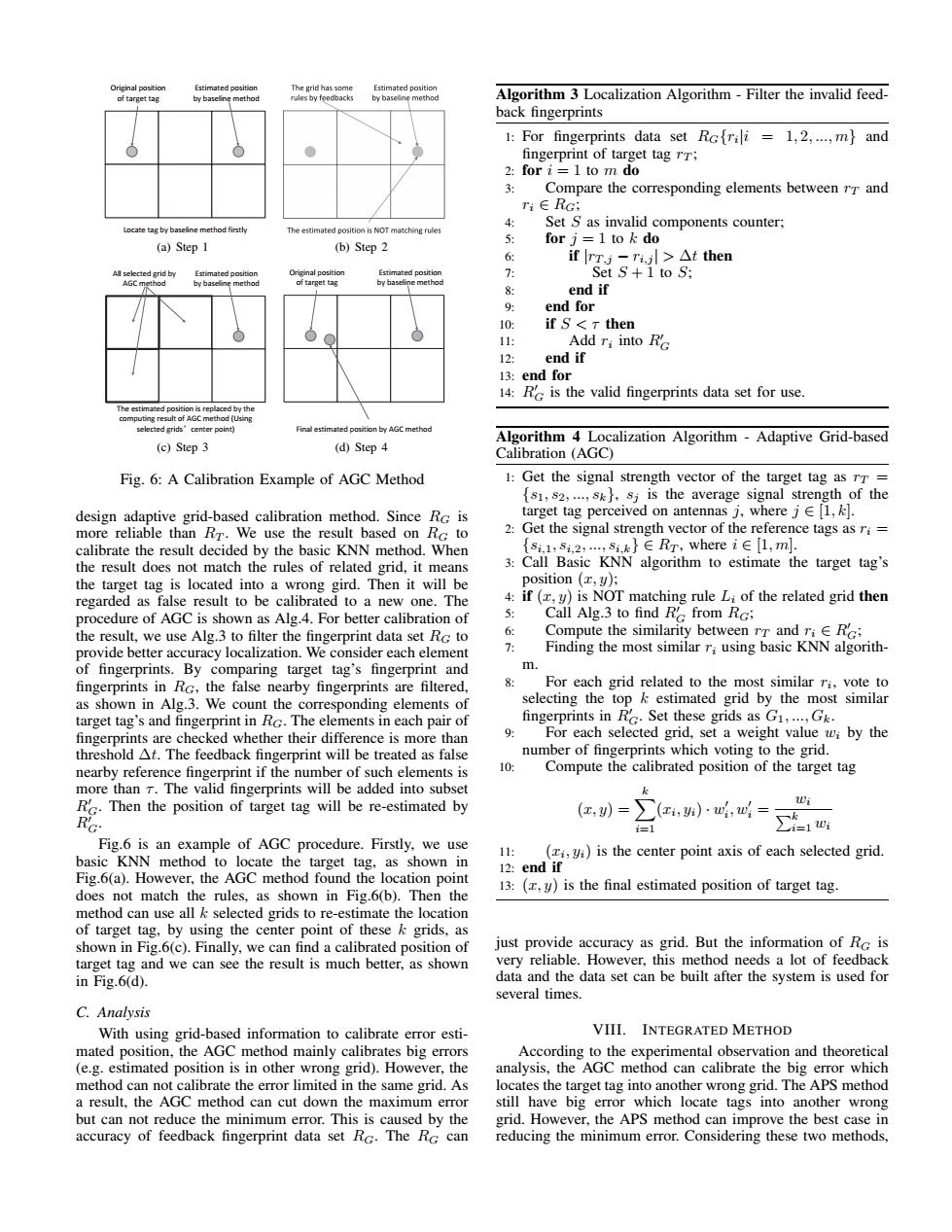
Original position Estimated position The grid has some Estimated position of target tag by baseline method rules by feedbacks by baseline method Algorithm 3 Localization Algorithm-Filter the invalid feed- back fingerprints 1:For fingerprints data set Rcfrili=1,2,...,m and fingerprint of target tag rr; 2:for i=1 to m do 3: Compare the corresponding elements between rr and T∈Rc; 4: Locate tag by baseine method firstly Set S as invalid components counter; The estimated position is NOT matching rules 5: for j=1 to k do (a)Step 1 (b)Step 2 6: if rT.j -ri.jl At then All selected grid by Estimated position Original position Estimated position Set S+1 to S: AGCm by basefine method of target tag 8: end if 9 end for 10: if S<T then 11 Add ri into RG 12: end if 13:end for 14:R is the valid fingerprints data set for use ed h ethod (U ted grids'center point) Finl estimated position by AGC metho Algorithm 4 Localization Algorithm -Adaptive Grid-based (c)Step 3 (d)Step 4 Calibration (AGC) Fig.6:A Calibration Example of AGC Method 1:Get the signal strength vector of the target tag as rr= 1s1,s2,...,sk,sj is the average signal strength of the design adaptive grid-based calibration method.Since RG is target tag perceived on antennas j,where j [1,k]. more reliable than Rr.We use the result based on Rc to 2:Get the signal strength vector of the reference tags as ri= calibrate the result decided by the basic KNN method.When {si,1,si,2,,si,k}∈Rr,where i∈[l,ml. the result does not match the rules of related grid,it means 3:Call Basic KNN algorithm to estimate the target tag's the target tag is located into a wrong gird.Then it will be position (x,y); regarded as false result to be calibrated to a new one.The 4:if(,y)is NOT matching rule Li of the related grid then procedure of AGC is shown as Alg.4.For better calibration of 5 Call Alg.3 to find R from RG; the result,we use Alg.3 to filter the fingerprint data set Rc to 6 Compute the similarity between rr and riERG: provide better accuracy localization.We consider each element 1 Finding the most similar r;using basic KNN algorith- of fingerprints.By comparing target tag's fingerprint and m fingerprints in RG,the false nearby fingerprints are filtered, For each grid related to the most similar ri,vote to as shown in Alg.3.We count the corresponding elements of selecting the top k estimated grid by the most similar target tag's and fingerprint in RG.The elements in each pair of fingerprints in R.Set these grids as G1,...,Gk. fingerprints are checked whether their difference is more than 9: For each selected grid,set a weight value wi by the threshold At.The feedback fingerprint will be treated as false number of fingerprints which voting to the grid. nearby reference fingerprint if the number of such elements is a Compute the calibrated position of the target tag more than T.The valid fingerprints will be added into subset RThen the position of target tag will be re-estimated by Wi R'c (,)=(,h)4,= 11 ∑1 Fig.6 is an example of AGC procedure.Firstly,we use 11: basic KNN method to locate the target tag,as shown in (i,y)is the center point axis of each selected grid. 12:end if Fig.6(a).However,the AGC method found the location point does not match the rules,as shown in Fig.6(b).Then the 13:(z,y)is the final estimated position of target tag. method can use all k selected grids to re-estimate the location of target tag,by using the center point of these k grids,as shown in Fig.6(c).Finally,we can find a calibrated position of just provide accuracy as grid.But the information of RG is target tag and we can see the result is much better,as shown very reliable.However,this method needs a lot of feedback in Fig.6(d). data and the data set can be built after the system is used for several times. C.Analysis With using grid-based information to calibrate error esti- VIII.INTEGRATED METHOD mated position,the AGC method mainly calibrates big errors According to the experimental observation and theoretical (e.g.estimated position is in other wrong grid).However,the analysis,the AGC method can calibrate the big error which method can not calibrate the error limited in the same grid.As locates the target tag into another wrong grid.The APS method a result,the AGC method can cut down the maximum error still have big error which locate tags into another wrong but can not reduce the minimum error.This is caused by the grid.However,the APS method can improve the best case in accuracy of feedback fingerprint data set RG.The Rc can reducing the minimum error.Considering these two methods,Original position of target tag Estimated position by baseline method Locate tag by baseline method firstly (a) Step 1 (b) Step 2 Estimated position by baseline method All selected grid by AGC method The estimated position is replaced by the computing result of AGC method (Using selected gridsÿcenter point) (c) Step 3 Estimated position by baseline method Original position of target tag Final estimated position by AGC method (d) Step 4 Fig. 6: A Calibration Example of AGC Method design adaptive grid-based calibration method. Since RG is more reliable than RT . We use the result based on RG to calibrate the result decided by the basic KNN method. When the result does not match the rules of related grid, it means the target tag is located into a wrong gird. Then it will be regarded as false result to be calibrated to a new one. The procedure of AGC is shown as Alg.4. For better calibration of the result, we use Alg.3 to filter the fingerprint data set RG to provide better accuracy localization. We consider each element of fingerprints. By comparing target tag’s fingerprint and fingerprints in RG, the false nearby fingerprints are filtered, as shown in Alg.3. We count the corresponding elements of target tag’s and fingerprint in RG. The elements in each pair of fingerprints are checked whether their difference is more than threshold Δt. The feedback fingerprint will be treated as false nearby reference fingerprint if the number of such elements is more than τ. The valid fingerprints will be added into subset R G. Then the position of target tag will be re-estimated by R G. Fig.6 is an example of AGC procedure. Firstly, we use basic KNN method to locate the target tag, as shown in Fig.6(a). However, the AGC method found the location point does not match the rules, as shown in Fig.6(b). Then the method can use all k selected grids to re-estimate the location of target tag, by using the center point of these k grids, as shown in Fig.6(c). Finally, we can find a calibrated position of target tag and we can see the result is much better, as shown in Fig.6(d). C. Analysis With using grid-based information to calibrate error estimated position, the AGC method mainly calibrates big errors (e.g. estimated position is in other wrong grid). However, the method can not calibrate the error limited in the same grid. As a result, the AGC method can cut down the maximum error but can not reduce the minimum error. This is caused by the accuracy of feedback fingerprint data set RG. The RG can Algorithm 3 Localization Algorithm - Filter the invalid feedback fingerprints 1: For fingerprints data set RG{ri|i = 1, 2, ..., m} and fingerprint of target tag rT ; 2: for i = 1 to m do 3: Compare the corresponding elements between rT and ri ∈ RG; 4: Set S as invalid components counter; 5: for j = 1 to k do 6: if |rT,j − ri,j | > Δt then 7: Set S + 1 to S; 8: end if 9: end for 10: if S<τ then 11: Add ri into R G 12: end if 13: end for 14: R G is the valid fingerprints data set for use. Algorithm 4 Localization Algorithm - Adaptive Grid-based Calibration (AGC) 1: Get the signal strength vector of the target tag as rT = {s1, s2, ..., sk}, sj is the average signal strength of the target tag perceived on antennas j, where j ∈ [1, k]. 2: Get the signal strength vector of the reference tags as ri = {si,1, si,2, ..., si,k} ∈ RT , where i ∈ [1, m]. 3: Call Basic KNN algorithm to estimate the target tag’s position (x, y); 4: if (x, y) is NOT matching rule Li of the related grid then 5: Call Alg.3 to find R G from RG; 6: Compute the similarity between rT and ri ∈ R G; 7: Finding the most similar ri using basic KNN algorithm. 8: For each grid related to the most similar ri, vote to selecting the top k estimated grid by the most similar fingerprints in R G. Set these grids as G1, ..., Gk. 9: For each selected grid, set a weight value wi by the number of fingerprints which voting to the grid. 10: Compute the calibrated position of the target tag (x, y) = k i=1 (xi, yi) · w i, w i = wi k i=1 wi 11: (xi, yi) is the center point axis of each selected grid. 12: end if 13: (x, y) is the final estimated position of target tag. just provide accuracy as grid. But the information of RG is very reliable. However, this method needs a lot of feedback data and the data set can be built after the system is used for several times. VIII. INTEGRATED METHOD According to the experimental observation and theoretical analysis, the AGC method can calibrate the big error which locates the target tag into another wrong grid. The APS method still have big error which locate tags into another wrong grid. However, the APS method can improve the best case in reducing the minimum error. Considering these two methods,�����������