正在加载图片...
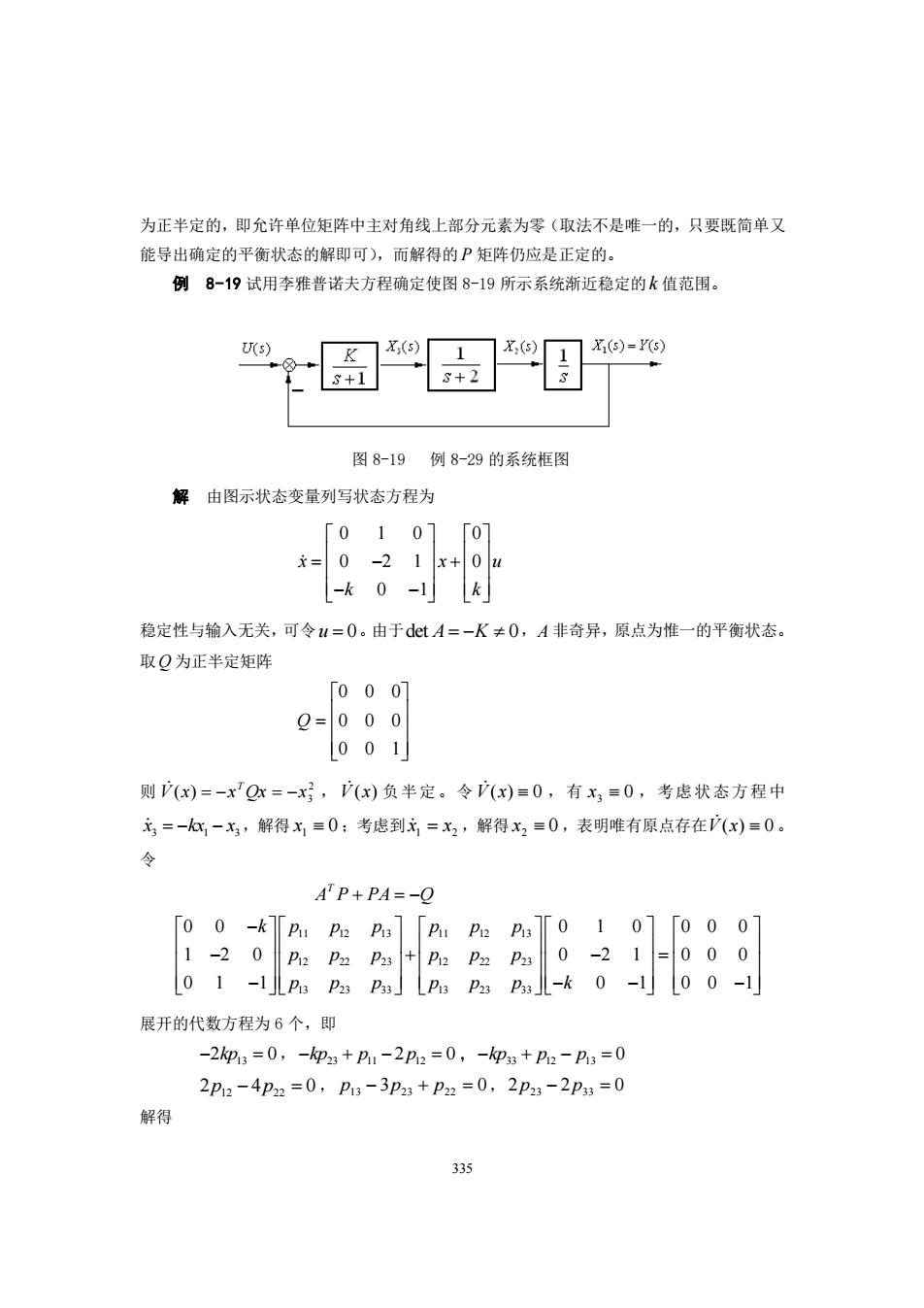
为正半定的,即允许单位矩阵中主对角线上部分元素为零(取法不是唯一的,只要既简单又 能导出确定的平衡状态的解即可),而解得的P矩阵仍应是正定的。 例8-19试用李雅普诺夫方程确定使图8-19所示系统渐近稳定的k值范围 图8-19例8-29的系统框图 解由图示状态变量列写状态方程为 「0101「0] =0-21x+0w -k0-1k 稳定性与输入无关,可令1=0。由于dtA=-K≠0,A非奇异,原点为惟一的平衡状态 取Q为正半定矩阵 000 0=000 001 则(x)=-x'=-x,(x)负半定。令广(x)=0,有x三0,考虑状态方程中 名=--x,解得x,三0:考虑到元=x2,解得x2三0,表明唯有原点存在广(x)三0。 A'P+PA=-Q [oo -Pe [Pr 1 070 00 1 -2 0 Pa:Papa P:Pz Pa 0 -2 1 =00 0 Lo 1 -1LPs Pa Ps LPa Pa PoJ-k o -1 00 -1 展开的代数方程为6个,即 -2p3=0,-p2+P1-2P2=0,-p+P2-P3=0 2p2-4P=0,P1-3p23+P2=0,2p23-2P=0 解得 335 335 为正半定的,即允许单位矩阵中主对角线上部分元素为零(取法不是唯一的,只要既简单又 能导出确定的平衡状态的解即可),而解得的 P 矩阵仍应是正定的。 例 8-19 试用李雅普诺夫方程确定使图 8-19 所示系统渐近稳定的 k 值范围。 图 8-19 例 8-29 的系统框图 解 由图示状态变量列写状态方程为 0 1 0 0 0 2 1 0 0 1 x x u k k = − + − − 稳定性与输入无关,可令 u = 0 。由于 det A = −K 0,A 非奇异,原点为惟一的平衡状态。 取 Q 为正半定矩阵 = 0 0 1 0 0 0 0 0 0 Q 则 2 3 V(x) x Qx x T = − = − , V (x) 负半定。令 V(x) 0 ,有 x3 0 ,考虑状态方程中 3 1 3 x kx x = − − ,解得 x1 0 ;考虑到 1 2 x = x ,解得 x2 0 ,表明唯有原点存在 V(x) 0 。 令 A P PA Q T + = − 11 12 13 11 12 13 12 22 23 12 22 23 13 23 33 13 23 33 0 0 0 1 0 0 0 0 1 2 0 0 2 1 0 0 0 0 1 1 0 1 0 0 1 k p p p p p p p p p p p p p p p p p p k − − + − = − − − − 展开的代数方程为 6 个,即 13 − = 2 0 kp , 23 11 12 − + − = kp p p2 0 , 33 12 13 − + − = kp p p 0 2p12 − 4p22 = 0 , p13 − 3p23 + p22 = 0, 2p23 − 2p33 = 0 解得