正在加载图片...
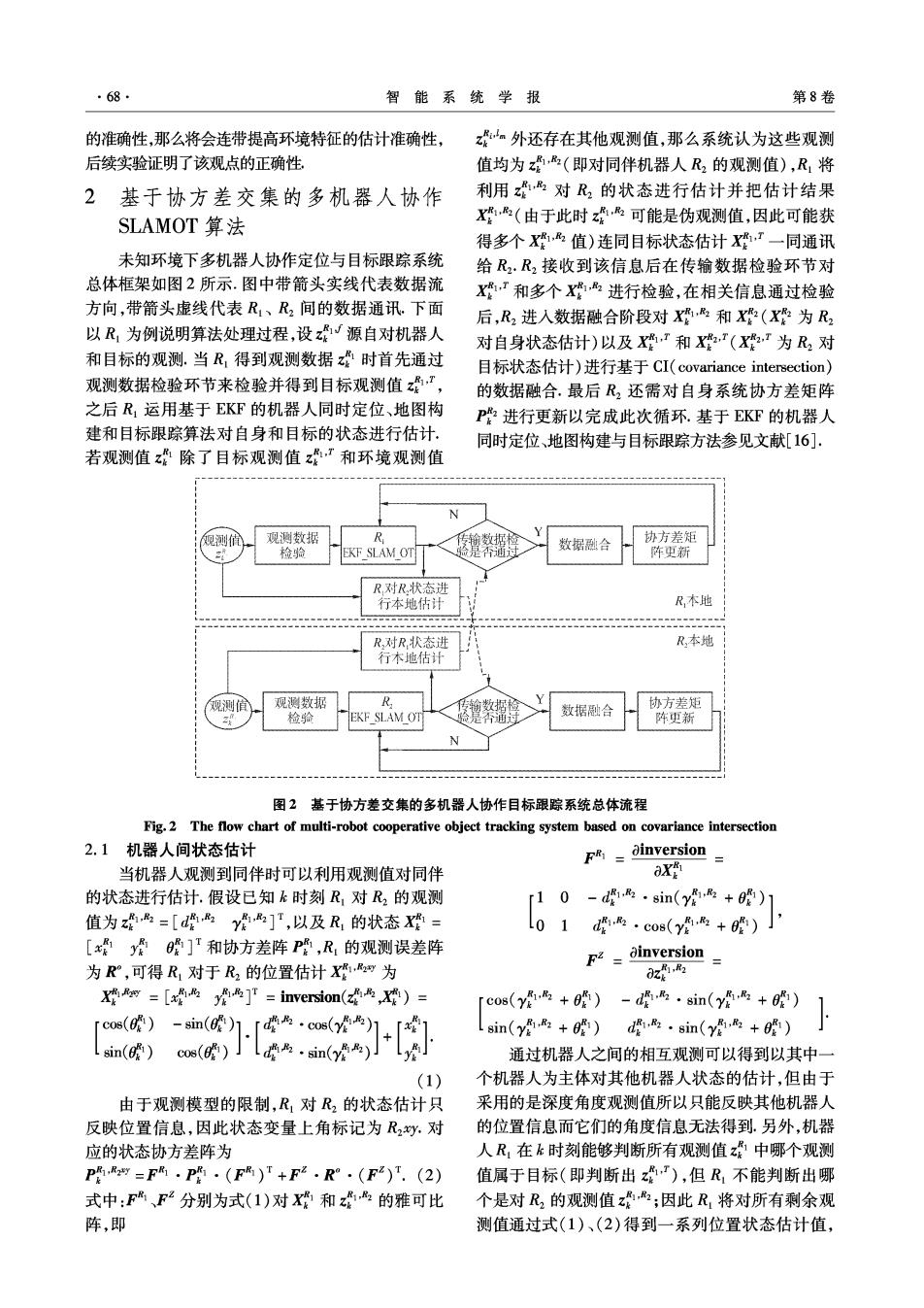
·68 智能系统学报 第8卷 的准确性,那么将会连带提高环境特征的估计准确性, z外还存在其他观测值,那么系统认为这些观测 后续实验证明了该观点的正确性 值均为,(即对同伴机器人R2的观测值),R1将 2基于协方差交集的多机器人协作 利用,对R2的状态进行估计并把估计结果 SLAMOT算法 ,品(由于此时可能是伪观测值,因此可能获 得多个X,品值)连同目标状态估计X,一同通讯 未知环境下多机器人协作定位与目标跟踪系统 给R2·R2接收到该信息后在传输数据检验环节对 总体框架如图2所示.图中带箭头实线代表数据流 和多个X品进行检验,在相关信息通过检验 方向,带箭头虚线代表R、R2间的数据通讯.下面 后,R2进入数据融合阶段对X,R和X(X为R2 以R,为例说明算法处理过程,设√源自对机器人 对自身状态估计)以及Xr和X(Xr为R2对 和目标的观测.当R,得到观测数据z时首先通过 目标状态估计)进行基于CI(covariance intersection) 观测数据检验环节来检验并得到目标观测值,”, 的数据融合,最后R2还需对自身系统协方差矩阵 之后R1运用基于EKF的机器人同时定位、地图构 P进行更新以完成此次循环.基于EKF的机器人 建和目标跟踪算法对自身和目标的状态进行估计. 同时定位、地图构建与目标跟踪方法参见文献[16]. 若观测值除了目标观测值z”和环境观测值 N 观测值 观测数据 R 专输数据 协方差矩 检验 EKF_SLAM OT 是否通过 数据融合 阵更新 R对R状态进 行本地估计 R,本地 R,对R状态进 R本地 行本地估计 观测值 观测数据 R. 输数据 检验 EKF SLAM OT 觉是通定 数据融合 协方差矩 阵更新 N 图2基于协方差交集的多机器人协作目标跟踪系统总体流程 Fig.2 The flow chart of multi-robot cooperative object tracking system based on covariance intersection 2.1机器人间状态估计 FR=dinversion 当机器人观测到同伴时可以利用观测值对同伴 X 的状态进行估计.假设已知时刻R,对R2的观测 r10 -·sin(y品+的)1 值为B=[政品y]T,以及R,的状态X= 01 政肠cos(y居+) [xy]T和协方差阵P,R,的观测误差阵 pz=ainversion= 为R°,可得R,对于R2的位置估计X,为 0z6 X球w=[效品]F=inversion(是品,球)= Tcos(y品+的)-d品·sin(y2+0) os(W)-sin()1.「d·os(2八+} sin(yB+)d·sin(y品+0) sin(e) cos(的)J【d片·in()J 通过机器人之间的相互观测可以得到以其中一 (1) 个机器人为主体对其他机器人状态的估计,但由于 由于观测模型的限制,R1对R2的状态估计只 采用的是深度角度观测值所以只能反映其他机器人 反映位置信息,因此状态变量上角标记为R2少.对 的位置信息而它们的角度信息无法得到.另外,机器 应的状态协方差阵为 人R,在k时刻能够判断所有观测值z中哪个观测 Pw=F·PR·(FR)T+F2·R°·(F2)T.(2) 值属于目标(即判断出z),但R,不能判断出哪 式中:F、F2分别为式(1)对X和,:的雅可比 个是对R2的观测值z;因此R,将对所有剩余观 阵,即 测值通过式(1)、(2)得到一系列位置状态估计值