正在加载图片...
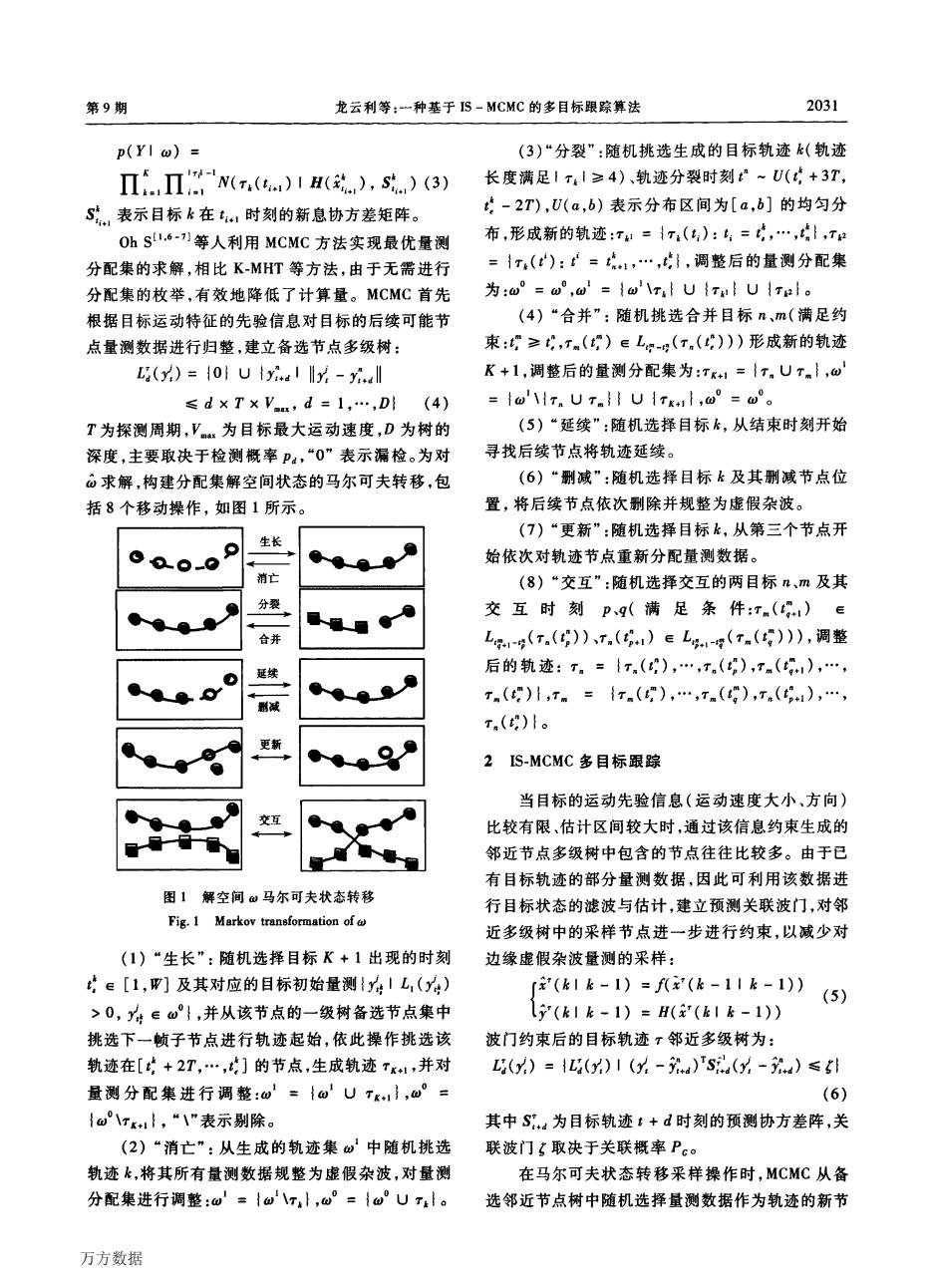
第9期 龙云利等:一种基于IS-MCMC的多目标跟踪算法 2031 p(YI w)= (3)“分裂”:随机挑选生成的目标轨迹k(轨迹 ΠΠ'(()1H(统),s)(3) 长度满足1T41≥4)、轨迹分裂时刻t”~U(t+3T, S,表示目标k在,时刻的新息协方差矩阵。 -2T),U(a,b)表示分布区间为[a,b]的均匀分 OhS1.6-刀等人利用MCMC方法实现最优量测 布,形成新的轨迹:T4=T(:):t=,…,},T2 分配集的求解,相比K-MHT等方法,由于无需进行 ={r(t):t=1,…,},调整后的量测分配集 分配集的枚举,有效地降低了计算量。MCMC首先 为:w°=w°,w={w\r}U{T}U{Ta}。 根据目标运动特征的先验信息对目标的后续可能节 (4)“合并”:随机挑选合并目标n、m(满足约 点量测数据进行归整,建立备选节点多级树: 束:≥,T(t)eLg-(T())形成新的轨迹 La(y)=10}Uiy*a1l-y‖ K+1,调整后的量测分配集为:Tx41={T,UT},w ≤d×T×Vr,d=1,…,D}(4) =fw'\{r.UTn}U{rx1f,u°=a°。 T为探测周期,V为目标最大运动速度,D为树的 (5)“延续”:随机选择目标k,从结束时刻开始 深度,主要取决于检测概率p4,“0”表示漏检。为对 寻找后续节点将轨迹延续。 求解,构建分配集解空间状态的马尔可夫转移,包 (6)“删减”:随机选择目标k及其删减节点位 括8个移动操作,如图1所示。 置,将后续节点依次别除并规整为虚假杂波。 (7)“更新”:随机选择目标k,从第三个节点开 生长 始依次对轨迹节点重新分配量测数据。 消亡 (8)“交互”:随机选择交互的两目标n、m及其 分裂 交互时刻pq(满足条件:Tn(g)e 合并 L1(T.()、T.(1)eL(T.()),调整 延续 后的轨迹:T。={T(),…,Tn(t),Tm(t),…, T()},rn={rn(),…,rm(g),rn(t1),…, T.(t)。 2IS-MCMC多目标跟踪 当目标的运动先验信息(运动速度大小、方向) 比较有限,估计区间较大时,通过该信息约束生成的 邻近节点多级树中包含的节点往往比较多。由于已 有目标轨迹的部分量测数据,因此可利用该数据进 图1解空间w马尔可夫状态转移 行目标状态的滤波与估计,建立预测关联波门,对邻 Fig.1 Markov transformation of 近多级树中的采样节点进一步进行约束,以减少对 (1)“生长”:随机选择目标K+1出现的时刻 边缘虚假杂波量测的采样: ∈[1,W]及其对应的目标初始量测{y|L,(y) (k1k-1)=fx(k-11k-1) (5) >0,y∈w°},并从该节点的一级树备选节点集中 (k1k-1)=H((k1k-1)) 挑选下一帧子节点进行轨迹起始,依此操作挑选该 波门约束后的目标轨迹T邻近多级树为: 轨迹在[+2T,…,]的节点,生成轨迹Tx1,并对 L(y)={(y)1(-d)rS(-d)≤} 量测分配集进行调整:w={wUTk1},w°= (6) {m\rk+1},“1”表示剔除。 其中S为目标轨迹:+d时刻的预测协方差阵,关 (2)“消亡”:从生成的轨迹集®中随机挑选 联波门;取决于关联概率Pc。 轨迹k,将其所有量测数据规整为虚假杂波,对量测 在马尔可夫状态转移采样操作时,MCMC从备 分配集进行调整:w'={w\r,},w°={w°UT.}。 选邻近节点树中随机选择量测数据作为轨迹的新节 万方数据( 5 ) 万方数据