正在加载图片...
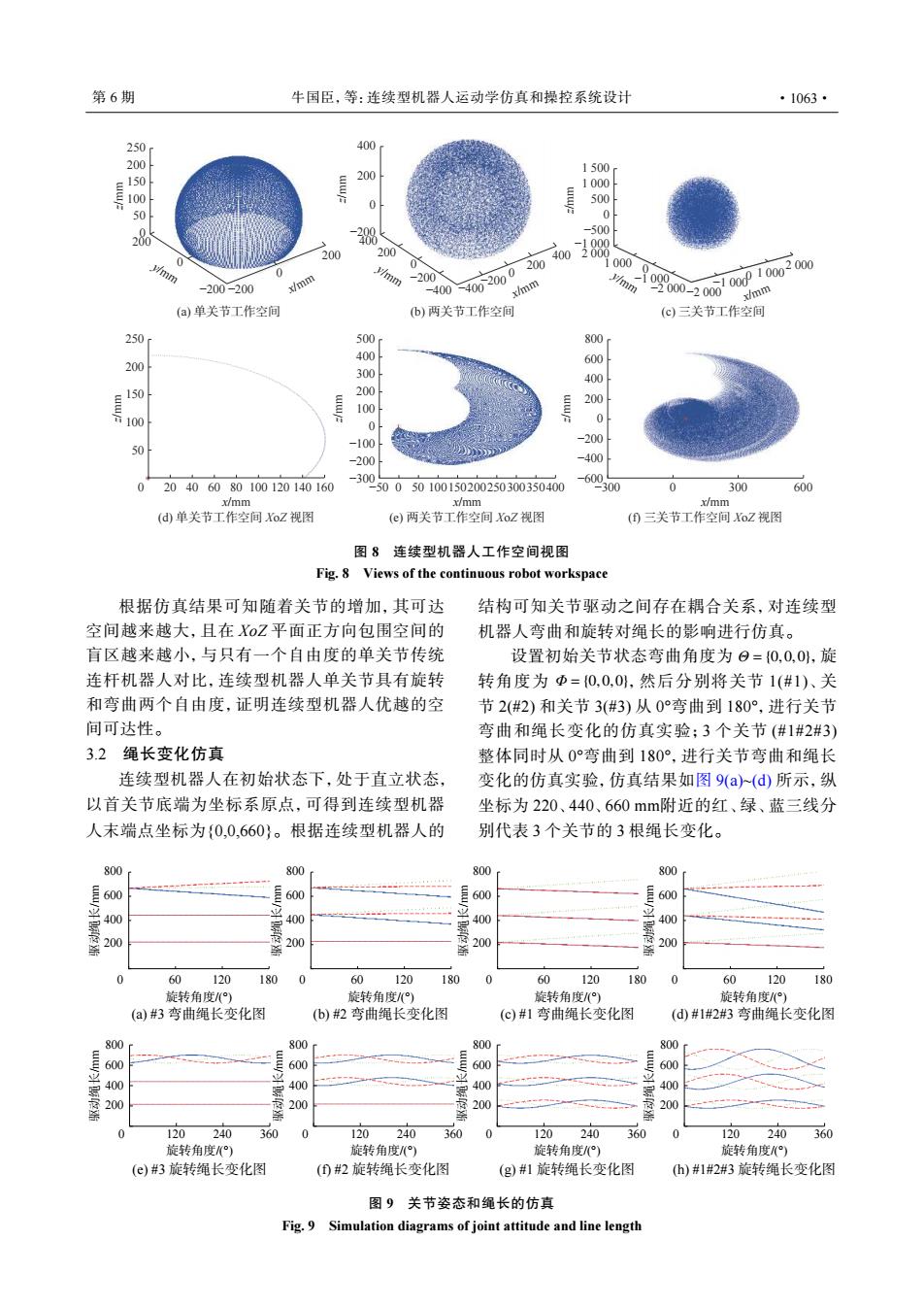
第6期 牛国臣,等:连续型机器人运动学仿真和操控系统设计 ·1063· 250 400 200 1500 150 200 1000 100 0 500 0 -500 200 200 38 0 400 y/mm 0 0 y/mm 200 0000 x/mm 40-400200 -200 -200-200 /mm 200-20d0o010o200 x/mm (a)单关节工作空间 (b)两关节工作空间 (c)三关节工作空间 250 500 800 400 200 600 300 400 150 200 200 100 100 0 0 -200 50 -100 -200 -400 -30 020406080100120140160 -50050100150200250300350400 602300 0 300 600 x/mm x/mm x/mm (d)单关节工作空间XoZ视图 (e)两关节工作空间XoZ视图 (①三关节工作空间XoZ视图 图8连续型机器人工作空间视图 Fig.8 Views of the continuous robot workspace 根据仿真结果可知随着关节的增加,其可达 结构可知关节驱动之间存在耦合关系,对连续型 空间越来越大,且在XoZ平面正方向包围空间的 机器人弯曲和旋转对绳长的影响进行仿真。 盲区越来越小,与只有一个自由度的单关节传统 设置初始关节状态弯曲角度为日=0,0,01,旋 连杆机器人对比,连续型机器人单关节具有旋转 转角度为Φ=0,0,01,然后分别将关节1(#1)、关 和弯曲两个自由度,证明连续型机器人优越的空 节2(#2)和关节3(#3)从0°弯曲到180°,进行关节 间可达性。 弯曲和绳长变化的仿真实验:3个关节(#1#2#3) 3.2绳长变化仿真 整体同时从0°弯曲到180°,进行关节弯曲和绳长 连续型机器人在初始状态下,处于直立状态, 变化的仿真实验,仿真结果如图9(a)(d)所示,纵 以首关节底端为坐标系原点,可得到连续型机器 坐标为220、440、660mm附近的红、绿、蓝三线分 人末端点坐标为0,0,660;。根据连续型机器人的 别代表3个关节的3根绳长变化。 800 800 800 800 600 600 600 600 400 400 400 400 200 200 0 0 60 120 180 0 60 120 180 0 60 120 180 0 60 120 180 旋转角度/() 旋转角度/() 旋转角度/() 旋转角度/) (a)#3弯曲绳长变化图 (b)#2弯曲绳长变化图 (c)#1弯曲绳长变化图 (d)#1#2#3弯曲绳长变化图 800 800 800 800 600 600 600 600 400 400 400 400 200 200 200 200 120240 360 120 240 360 120 240 360 0 120240 360 旋转角度() 旋转角度/() 旋转角度/() 旋转角度/() (e)#3旋转绳长变化图 (0#2旋转绳长变化图 (g)#1旋转绳长变化图 (h)#1#2#3旋转绳长变化图 图9关节姿态和绳长的仿真 Fig.9 Simulation diagrams of joint attitude and line length200 250 150 100 0 0 −200 −200 200 200 50 0 y/mm x/mm z/m m 400 200 0 −200 z/m m 0 0 −400 −400−200 400 200 −200 400 y 200 /mm x/mm (a) 单关节工作空间 (b) 两关节工作空间 (c) 三关节工作空间 250 200 150 100 50 0 20 40 60 80 100 120 140 160 x/mm z/mm 500 400 300 −300 −50 −100 0 100 200 −200 0 50 100150200250 350 300 400 x/mm z/mm 800 600 400 −600 −200 0 200 −400 −300 0 300 600 x/mm z/mm (d) 单关节工作空间 XoZ 视图 (e) 两关节工作空间 XoZ 视图 (f) 三关节工作空间 XoZ 视图 1 500 500 0 1 000 −500 −1 000 1 000 0 −2 000 −1 000 2 000 −2 000 −1 000 0 1 0002 000 y/mm x/mm z/mm 图 8 连续型机器人工作空间视图 Fig. 8 Views of the continuous robot workspace 根据仿真结果可知随着关节的增加,其可达 空间越来越大,且在 XoZ 平面正方向包围空间的 盲区越来越小,与只有一个自由度的单关节传统 连杆机器人对比,连续型机器人单关节具有旋转 和弯曲两个自由度,证明连续型机器人优越的空 间可达性。 3.2 绳长变化仿真 连续型机器人在初始状态下,处于直立状态, 以首关节底端为坐标系原点,可得到连续型机器 人末端点坐标为{0,0,660}。根据连续型机器人的 结构可知关节驱动之间存在耦合关系,对连续型 机器人弯曲和旋转对绳长的影响进行仿真。 Θ = {0,0,0} Φ = {0,0,0} 设置初始关节状态弯曲角度为 ,旋 转角度为 ,然后分别将关节 1(#1)、关 节 2(#2) 和关节 3(#3) 从 0°弯曲到 180°,进行关节 弯曲和绳长变化的仿真实验;3 个关节 (#1#2#3) 整体同时从 0°弯曲到 180°,进行关节弯曲和绳长 变化的仿真实验,仿真结果如图 9(a)~(d) 所示,纵 坐标为 220、440、660 mm附近的红、绿、蓝三线分 别代表 3 个关节的 3 根绳长变化。 800 600 400 200 0 60 120 180 旋转角度/(°) 驱动绳长/mm 旋转角度/(°) 旋转角度/(°) 旋转角度/(°) 120 240 200 400 600 800 360 驱动绳长/mm 旋转角度/(°) (a) #3 弯曲绳长变化图 (e) #3 旋转绳长变化图 (f) #2 旋转绳长变化图 (g) #1 旋转绳长变化图 (b) #2 弯曲绳长变化图 (c) #1 弯曲绳长变化图 (d) #1#2#3 弯曲绳长变化图 (h) #1#2#3 旋转绳长变化图 800 600 400 200 0 60 120 180 驱动绳长/mm 800 600 400 200 0 60 120 180 驱动绳长/mm 800 600 400 200 0 60 120 180 驱动绳长/mm 0 120 240 200 400 600 800 360 驱动绳长/mm 旋转角度/(°) 0 120 240 200 400 600 800 360 驱动绳长/mm 旋转角度/(°) 0 120 240 200 400 600 800 360 驱动绳长/mm 旋转角度/(°) 0 图 9 关节姿态和绳长的仿真 Fig. 9 Simulation diagrams of joint attitude and line length 第 6 期 牛国臣,等:连续型机器人运动学仿真和操控系统设计 ·1063·