正在加载图片...
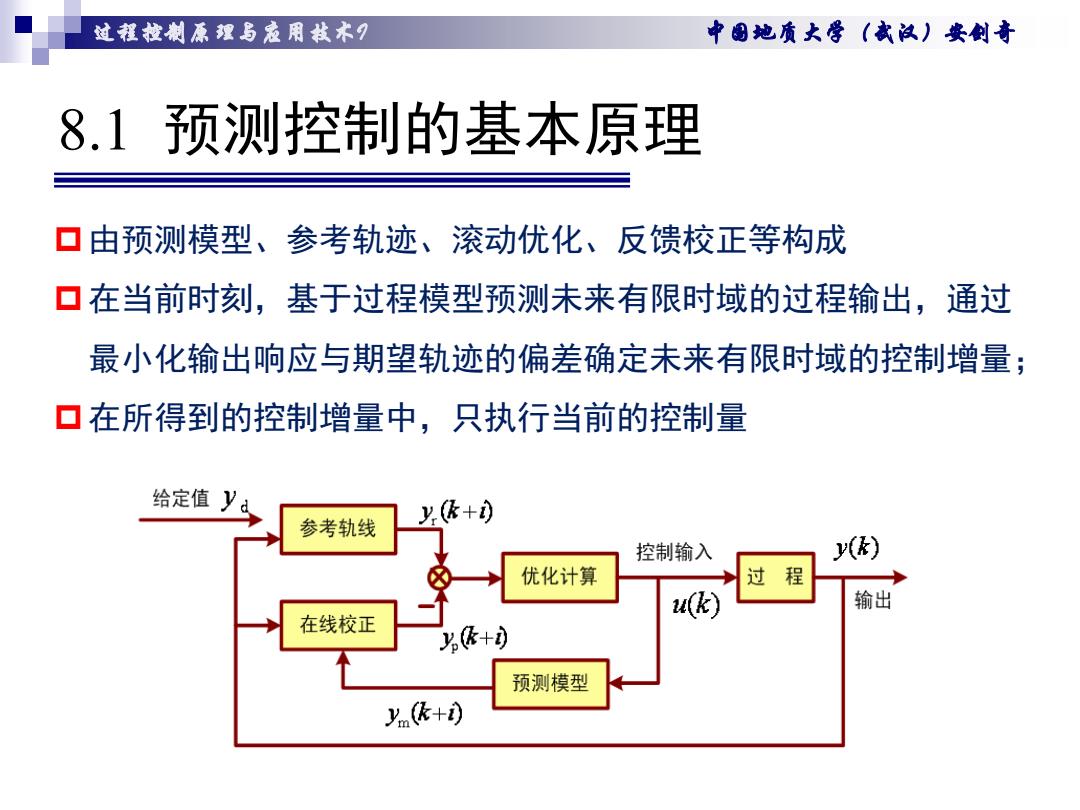
过程校制原狸与寇用我术月 中周她质大学(武议)安剑奇 8.1预测控制的基本原理 口由预测模型、参考轨迹、滚动优化、反馈校正等构成 ▣在当前时刻,基于过程模型预测未来有限时域的过程输出,通过 最小化输出响应与期望轨迹的偏差确定未来有限时域的控制增量; ▣在所得到的控制增量中,只执行当前的控制量 给定值y 参考轨线 y匠+) 控制输入 (&) 优化计算 过程 u(k) 输出 在线校正 匠+田 预测模型 依+)过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 8.1 预测控制的基本原理 由预测模型、参考轨迹、滚动优化、反馈校正等构成 在当前时刻,基于过程模型预测未来有限时域的过程输出,通过 最小化输出响应与期望轨迹的偏差确定未来有限时域的控制增量; 在所得到的控制增量中,只执行当前的控制量