正在加载图片...
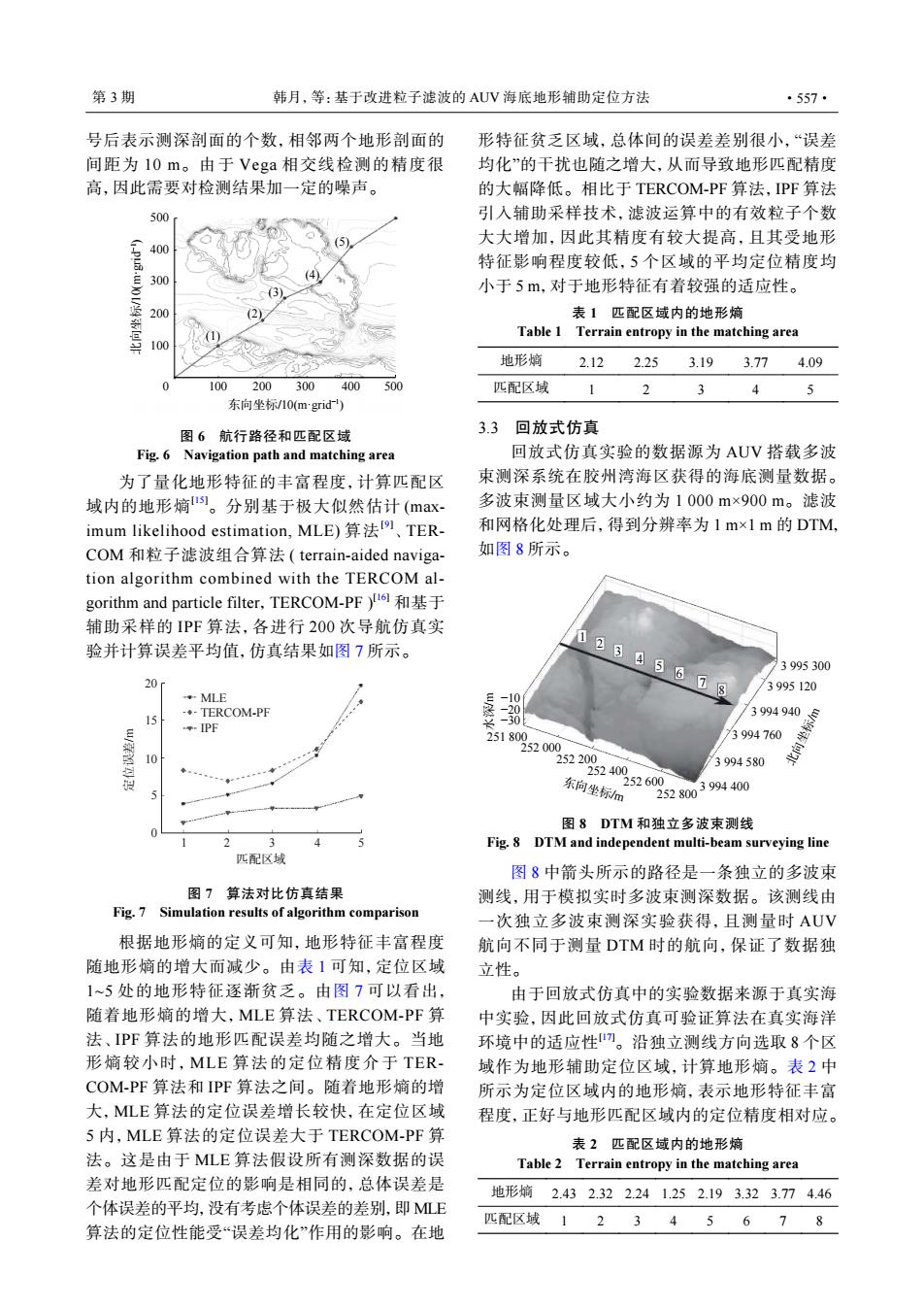
第3期 韩月,等:基于改进粒子滤波的AUV海底地形辅助定位方法 ·557· 号后表示测深剖面的个数,相邻两个地形剖面的 形特征贫乏区域,总体间的误差差别很小,“误差 间距为10m。由于Vega相交线检测的精度很 均化”的干扰也随之增大,从而导致地形匹配精度 高,因此需要对检测结果加一定的噪声。 的大幅降低。相比于TERCOM-PF算法,IPF算法 500 引入辅助采样技术,滤波运算中的有效粒子个数 大大增加,因此其精度有较大提高,且其受地形 400 特征影响程度较低,5个区域的平均定位精度均 300 小于5m,对于地形特征有着较强的适应性。 200 (2) 表1匹配区域内的地形熵 Table 1 Terrain entropy in the matching area 100 地形嫡 2.12 2.25 3.19 3.77 4.09 100 200300400 500 匹配区域 1 3 5 东向坐标/10(mgid) 图6航行路径和匹配区域 3.3回放式仿真 Fig.6 Navigation path and matching area 回放式仿真实验的数据源为AUV搭载多波 为了量化地形特征的丰富程度,计算匹配区 束测深系统在胶州湾海区获得的海底测量数据。 域内的地形嫡。分别基于极大似然估计(max 多波束测量区域大小约为1000m×900m。滤波 imum likelihood estimation,.MLE)算法、TER- 和网格化处理后,得到分辨率为1m×1m的DTM, COM和粒子滤波组合算法(terrain-aided naviga- 如图8所示。 tion algorithm combined with the TERCOM al- gorithm and particle filter,TERCOM-PF)l6和基于 辅助采样的P℉算法,各进行200次导航仿真实 验并计算误差平均值,仿真结果如图7所示。 73995300 20 02日46618 73995120 MIE -10 -+-TERCOM-PE -20 3994940 -30 25180 3994760 25200 25220 北向坐标m 3994580 25240 东向坐标/m 252600 3994400 252800 图8DTM和独立多波束测线 2 3 Fig.8 DTM and independent multi-beam surveying line 匹配区域 图8中箭头所示的路径是一条独立的多波束 图7算法对比仿真结果 测线,用于模拟实时多波束测深数据。该测线由 Fig.7 Simulation results of algorithm comparison 一次独立多波束测深实验获得,且测量时AUV 根据地形嫡的定义可知,地形特征丰富程度 航向不同于测量DTM时的航向,保证了数据独 随地形熵的增大而减少。由表1可知,定位区域 立性。 1~5处的地形特征逐渐贫乏。由图7可以看出, 由于回放式仿真中的实验数据来源于真实海 随着地形熵的增大,MLE算法、TERCOM-PF算 中实验,因此回放式仿真可验证算法在真实海洋 法、IP℉算法的地形匹配误差均随之增大。当地 环境中的适应性m。沿独立测线方向选取8个区 形熵较小时,MLE算法的定位精度介于TER- 域作为地形辅助定位区域,计算地形熵。表2中 COM-PF算法和IPF算法之间。随着地形嫡的增 所示为定位区域内的地形嫡,表示地形特征丰富 大,MLE算法的定位误差增长较快,在定位区域 程度,正好与地形匹配区域内的定位精度相对应。 5内,MLE算法的定位误差大于TERCOM-PF算 表2匹配区域内的地形熵 法。这是由于MLE算法假设所有测深数据的误 Table 2 Terrain entropy in the matching area 差对地形匹配定位的影响是相同的,总体误差是 地形嫡2.432.322.241.252.193.323.774.46 个体误差的平均,没有考虑个体误差的差别,即MLE 匹配区域 3 4 5 6 7 算法的定位性能受“误差均化”作用的影响。在地 8号后表示测深剖面的个数,相邻两个地形剖面的 间距为 10 m。由于 Vega 相交线检测的精度很 高,因此需要对检测结果加一定的噪声。 (1) (2) (3) (4) (5) 0 100 200 300 400 500 100 200 300 400 500 东向坐标/10(m·grid−1) 北向坐标/10(m·grid−1 ) 图 6 航行路径和匹配区域 Fig. 6 Navigation path and matching area 为了量化地形特征的丰富程度,计算匹配区 域内的地形熵[15]。分别基于极大似然估计 (maximum likelihood estimation, MLE) 算法[9] 、TERCOM 和粒子滤波组合算法 ( terrain-aided navigation algorithm combined with the TERCOM algorithm and particle filter,TERCOM-PF )[16] 和基于 辅助采样的 IPF 算法,各进行 200 次导航仿真实 验并计算误差平均值,仿真结果如图 7 所示。 1 2 0 5 定位误差/m 匹配区域 10 MLE TERCOM-PF IPF 15 20 3 4 5 图 7 算法对比仿真结果 Fig. 7 Simulation results of algorithm comparison 根据地形熵的定义可知,地形特征丰富程度 随地形熵的增大而减少。由表 1 可知,定位区域 1~5 处的地形特征逐渐贫乏。由图 7 可以看出, 随着地形熵的增大,MLE 算法、TERCOM-PF 算 法、IPF 算法的地形匹配误差均随之增大。当地 形熵较小时,MLE 算法的定位精度介于 TERCOM-PF 算法和 IPF 算法之间。随着地形熵的增 大,MLE 算法的定位误差增长较快,在定位区域 5 内,MLE 算法的定位误差大于 TERCOM-PF 算 法。这是由于 MLE 算法假设所有测深数据的误 差对地形匹配定位的影响是相同的,总体误差是 个体误差的平均,没有考虑个体误差的差别,即 MLE 算法的定位性能受“误差均化”作用的影响。在地 形特征贫乏区域,总体间的误差差别很小,“误差 均化”的干扰也随之增大,从而导致地形匹配精度 的大幅降低。相比于 TERCOM-PF 算法,IPF 算法 引入辅助采样技术,滤波运算中的有效粒子个数 大大增加,因此其精度有较大提高,且其受地形 特征影响程度较低,5 个区域的平均定位精度均 小于 5 m,对于地形特征有着较强的适应性。 表 1 匹配区域内的地形熵 Table 1 Terrain entropy in the matching area 地形熵 2.12 2.25 3.19 3.77 4.09 匹配区域 1 2 3 4 5 3.3 回放式仿真 回放式仿真实验的数据源为 AUV 搭载多波 束测深系统在胶州湾海区获得的海底测量数据。 多波束测量区域大小约为 1 000 m×900 m。滤波 和网格化处理后,得到分辨率为 1 m×1 m 的 DTM, 如图 8 所示。 251 800 −30 −20 −10 252 000 252 200 水深/m 东向坐标/m 北向坐标/m 8 7 6 5 4 3 2 1 252 400 252 600 252 800 3 994 400 3 994 580 3 994 760 3 994 940 3 995 120 3 995 300 图 8 DTM 和独立多波束测线 Fig. 8 DTM and independent multi-beam surveying line 图 8 中箭头所示的路径是一条独立的多波束 测线,用于模拟实时多波束测深数据。该测线由 一次独立多波束测深实验获得,且测量时 AUV 航向不同于测量 DTM 时的航向,保证了数据独 立性。 由于回放式仿真中的实验数据来源于真实海 中实验,因此回放式仿真可验证算法在真实海洋 环境中的适应性[17]。沿独立测线方向选取 8 个区 域作为地形辅助定位区域,计算地形熵。表 2 中 所示为定位区域内的地形熵,表示地形特征丰富 程度,正好与地形匹配区域内的定位精度相对应。 表 2 匹配区域内的地形熵 Table 2 Terrain entropy in the matching area 地形熵 2.43 2.32 2.24 1.25 2.19 3.32 3.77 4.46 匹配区域 1 2 3 4 5 6 7 8 第 3 期 韩月,等:基于改进粒子滤波的 AUV 海底地形辅助定位方法 ·557·