正在加载图片...
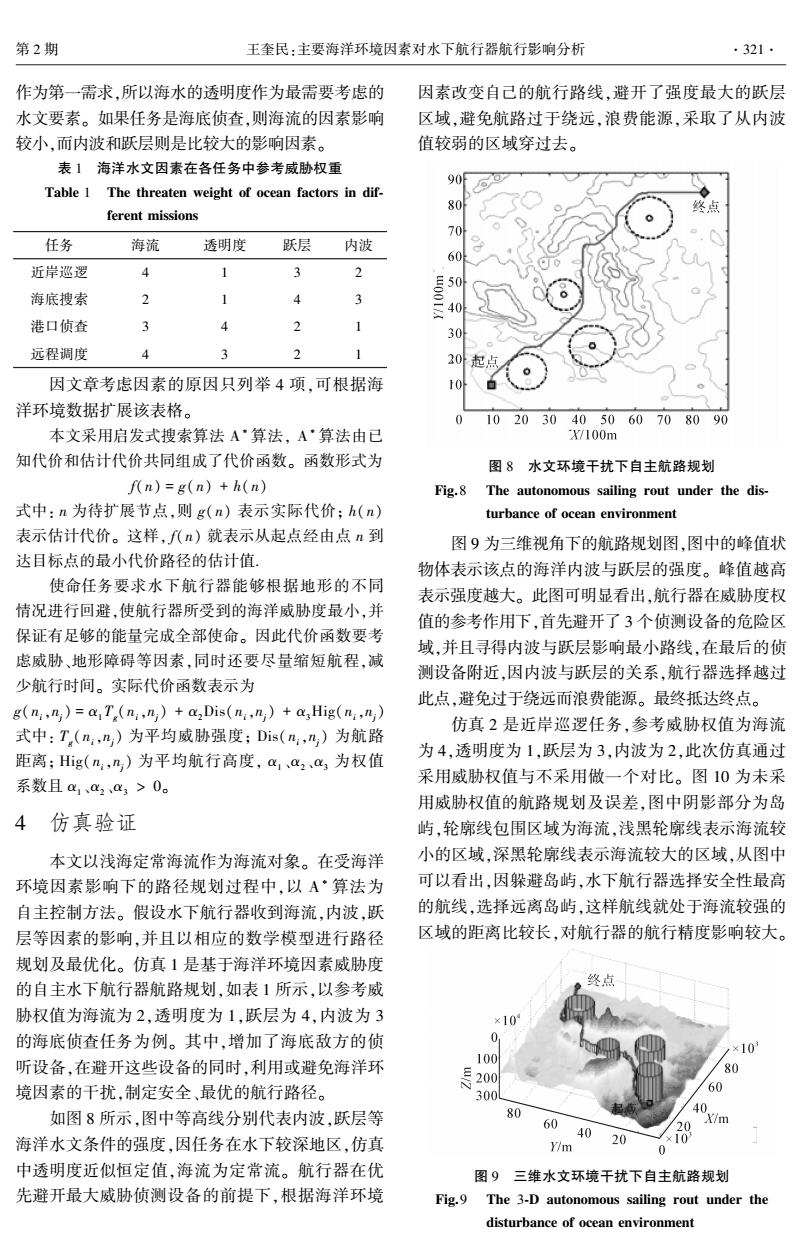
第2期 王奎民:主要海洋环境因素对水下航行器航行影响分析 ·321. 作为第一需求,所以海水的透明度作为最需要考虑的 因素改变自己的航行路线,避开了强度最大的跃层 水文要素。如果任务是海底侦查,则海流的因素影响 区域,避免航路过于绕远,浪费能源,采取了从内波 较小,而内波和跃层则是比较大的影响因素。 值较弱的区域穿过去。 表1海洋水文因素在各任务中参考威胁权重 90 Table 1 The threaten weight of ocean factors in dif- 点 ferent missions 70 任务 海流 透明度 跃层 内波 60H 近岸巡逻 4 1 3 2 海底搜索 2 1 3 40 港口侦查 3 4 2 1 30 远程调度 3 2 1 因文章考虑因素的原因只列举4项,可根据海 洋环境数据扩展该表格。 102030405060708090 本文采用启发式搜索算法A·算法,A·算法由已 X/100m 知代价和估计代价共同组成了代价函数。函数形式为 图8水文环境干扰下自主航路规划 f(n)=g(n)+h(n) Fig.8 The autonomous sailing rout under the dis- 式中:n为待扩展节点,则g(n)表示实际代价:h(n) turbance of ocean environment 表示估计代价。这样,f(n)就表示从起点经由点n到 图9为三维视角下的航路规划图,图中的峰值状 达目标点的最小代价路径的估计值。 物体表示该点的海洋内波与跃层的强度。峰值越高 使命任务要求水下航行器能够根据地形的不同 表示强度越大。此图可明显看出,航行器在威胁度权 情况进行回避,使航行器所受到的海洋威胁度最小,并 值的参考作用下,首先避开了3个侦测设备的危险区 保证有足够的能量完成全部使命。因此代价函数要考 域,并且寻得内波与跃层影响最小路线,在最后的侦 虑威胁、地形障碍等因素,同时还要尽量缩短航程,减 测设备附近,因内波与跃层的关系,航行器选择越过 少航行时间。实际代价函数表示为 此点,避免过于绕远而浪费能源。最终抵达终点。 g(ni,n)=aT (ni,n)aDis(ni,n)aHig(ni,n;) 仿真2是近岸巡逻任务,参考威胁权值为海流 式中:T,(n,n,)为平均威胁强度;Dis(n:,n)为航路 距离;Hig(n,n)为平均航行高度,a1a2,a为权值 为4,透明度为1,跃层为3,内波为2,此次仿真通过 系数且a1、a2、a3>0 采用威胁权值与不采用做一个对比。图10为未采 用威胁权值的航路规划及误差,图中阴影部分为岛 4 仿真验证 屿,轮廓线包围区域为海流,浅黑轮廓线表示海流较 本文以浅海定常海流作为海流对象。在受海洋 小的区域,深黑轮廓线表示海流较大的区域,从图中 环境因素影响下的路径规划过程中,以A·算法为 可以看出,因躲避岛屿,水下航行器选择安全性最高 自主控制方法。假设水下航行器收到海流,内波,跃 的航线,选择远离岛屿,这样航线就处于海流较强的 层等因素的影响,并且以相应的数学模型进行路径 区域的距离比较长,对航行器的航行精度影响较大。 规划及最优化。仿真1是基于海洋环境因素威胁度 的自主水下航行器航路规划,如表1所示,以参考威 终点 胁权值为海流为2,透明度为1,跃层为4,内波为3 ×10 的海底侦查任务为例。其中,增加了海底敌方的侦 01 ×10 听设备,在避开这些设备的同时,利用或避免海洋环 100 80 境因素的干扰,制定安全、最优的航行路径。 三20o 300 60 40 如图8所示,图中等高线分别代表内波,跃层等 80 6040 X/m 20 海洋水文条件的强度,因任务在水下较深地区,仿真 20 1 Y/m 中透明度近似恒定值,海流为定常流。航行器在优 图9三维水文环境干扰下自主航路规划 先避开最大威胁侦测设备的前提下,根据海洋环境 Fig.9 The 3-D autonomous sailing rout under the disturbance of ocean environment作为第一需求,所以海水的透明度作为最需要考虑的 水文要素。 如果任务是海底侦查,则海流的因素影响 较小,而内波和跃层则是比较大的影响因素。 表 1 海洋水文因素在各任务中参考威胁权重 Table 1 The threaten weight of ocean factors in dif⁃ ferent missions 任务 海流 透明度 跃层 内波 近岸巡逻 4 1 3 2 海底搜索 2 1 4 3 港口侦查 3 4 2 1 远程调度 4 3 2 1 因文章考虑因素的原因只列举 4 项,可根据海 洋环境数据扩展该表格。 本文采用启发式搜索算法 A ∗ 算法, A ∗ 算法由已 知代价和估计代价共同组成了代价函数。 函数形式为 f(n) = g(n) + h(n) 式中: n 为待扩展节点,则 g(n) 表示实际代价; h(n) 表示估计代价。 这样, f(n) 就表示从起点经由点 n 到 达目标点的最小代价路径的估计值. 使命任务要求水下航行器能够根据地形的不同 情况进行回避,使航行器所受到的海洋威胁度最小,并 保证有足够的能量完成全部使命。 因此代价函数要考 虑威胁、地形障碍等因素,同时还要尽量缩短航程,减 少航行时间。 实际代价函数表示为 g(ni,nj) = α1Tg(ni,nj) + α2Dis(ni,nj) + α3Hig(ni,nj) 式中: Tg(ni,nj) 为平均威胁强度; Dis(ni,nj) 为航路 距离; Hig(ni,nj) 为平均航行高度, α1 、α2 、α3 为权值 系数且 α1 、α2 、α3 > 0。 4 仿真验证 本文以浅海定常海流作为海流对象。 在受海洋 环境因素影响下的路径规划过程中,以 A ∗ 算法为 自主控制方法。 假设水下航行器收到海流,内波,跃 层等因素的影响,并且以相应的数学模型进行路径 规划及最优化。 仿真 1 是基于海洋环境因素威胁度 的自主水下航行器航路规划,如表 1 所示,以参考威 胁权值为海流为 2,透明度为 1,跃层为 4,内波为 3 的海底侦查任务为例。 其中,增加了海底敌方的侦 听设备,在避开这些设备的同时,利用或避免海洋环 境因素的干扰,制定安全、最优的航行路径。 如图 8 所示,图中等高线分别代表内波,跃层等 海洋水文条件的强度,因任务在水下较深地区,仿真 中透明度近似恒定值,海流为定常流。 航行器在优 先避开最大威胁侦测设备的前提下,根据海洋环境 因素改变自己的航行路线,避开了强度最大的跃层 区域,避免航路过于绕远,浪费能源,采取了从内波 值较弱的区域穿过去。 图 8 水文环境干扰下自主航路规划 Fig.8 The autonomous sailing rout under the dis⁃ turbance of ocean environment 图 9 为三维视角下的航路规划图,图中的峰值状 物体表示该点的海洋内波与跃层的强度。 峰值越高 表示强度越大。 此图可明显看出,航行器在威胁度权 值的参考作用下,首先避开了 3 个侦测设备的危险区 域,并且寻得内波与跃层影响最小路线,在最后的侦 测设备附近,因内波与跃层的关系,航行器选择越过 此点,避免过于绕远而浪费能源。 最终抵达终点。 仿真 2 是近岸巡逻任务,参考威胁权值为海流 为 4,透明度为 1,跃层为 3,内波为 2,此次仿真通过 采用威胁权值与不采用做一个对比。 图 10 为未采 用威胁权值的航路规划及误差,图中阴影部分为岛 屿,轮廓线包围区域为海流,浅黑轮廓线表示海流较 小的区域,深黑轮廓线表示海流较大的区域,从图中 可以看出,因躲避岛屿,水下航行器选择安全性最高 的航线,选择远离岛屿,这样航线就处于海流较强的 区域的距离比较长,对航行器的航行精度影响较大。 图 9 三维水文环境干扰下自主航路规划 Fig.9 The 3⁃D autonomous sailing rout under the disturbance of ocean environment 第 2 期 王奎民:主要海洋环境因素对水下航行器航行影响分析 ·321·