正在加载图片...
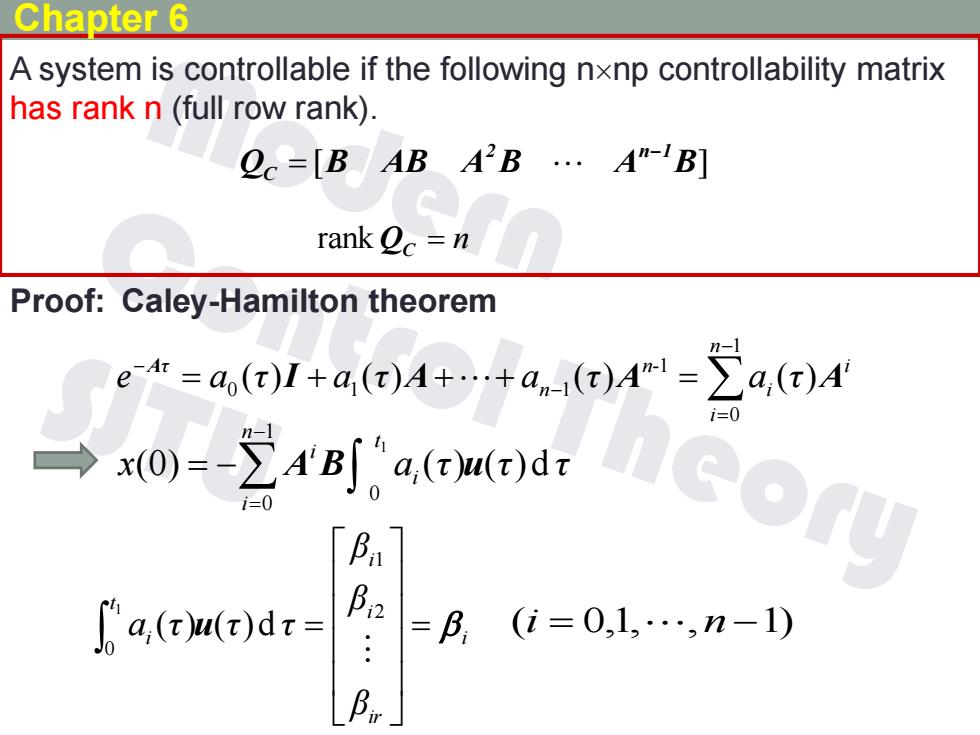
Chapter 6 A system is controllable if the following nxnp controllability matrix has rank n(full row rank). Oc=[B AB A'B·Am-B] rank Oc =n Proof:Caley-Hamilton theorem e*-d()I+a()4+>Fa.i()A->a() →x0)=-∑ABa,(ra(r)dr Ba neory i=0 a(r)u(r)dr- B2 =B(i=0,1,…,n-1) BrA system is controllable if the following nnp controllability matrix has rank n (full row rank). Q [B AB A B A B] 2 n 1 C rank QC n Proof: Caley-Hamilton theorem 1 0 1 0 1 1 ( ) ( ) ( ) ( ) n i i i n- n τ e a τ I a τ A a τ A a τ A A x a τ τ τ t i n i i (0) ( ) ( )d 1 0 1 0 A B u i ir i i t i β β β a τ τ τ 2 1 0 ( ) ( )d 1 u (i 0,1, ,n 1) Chapter 6