正在加载图片...
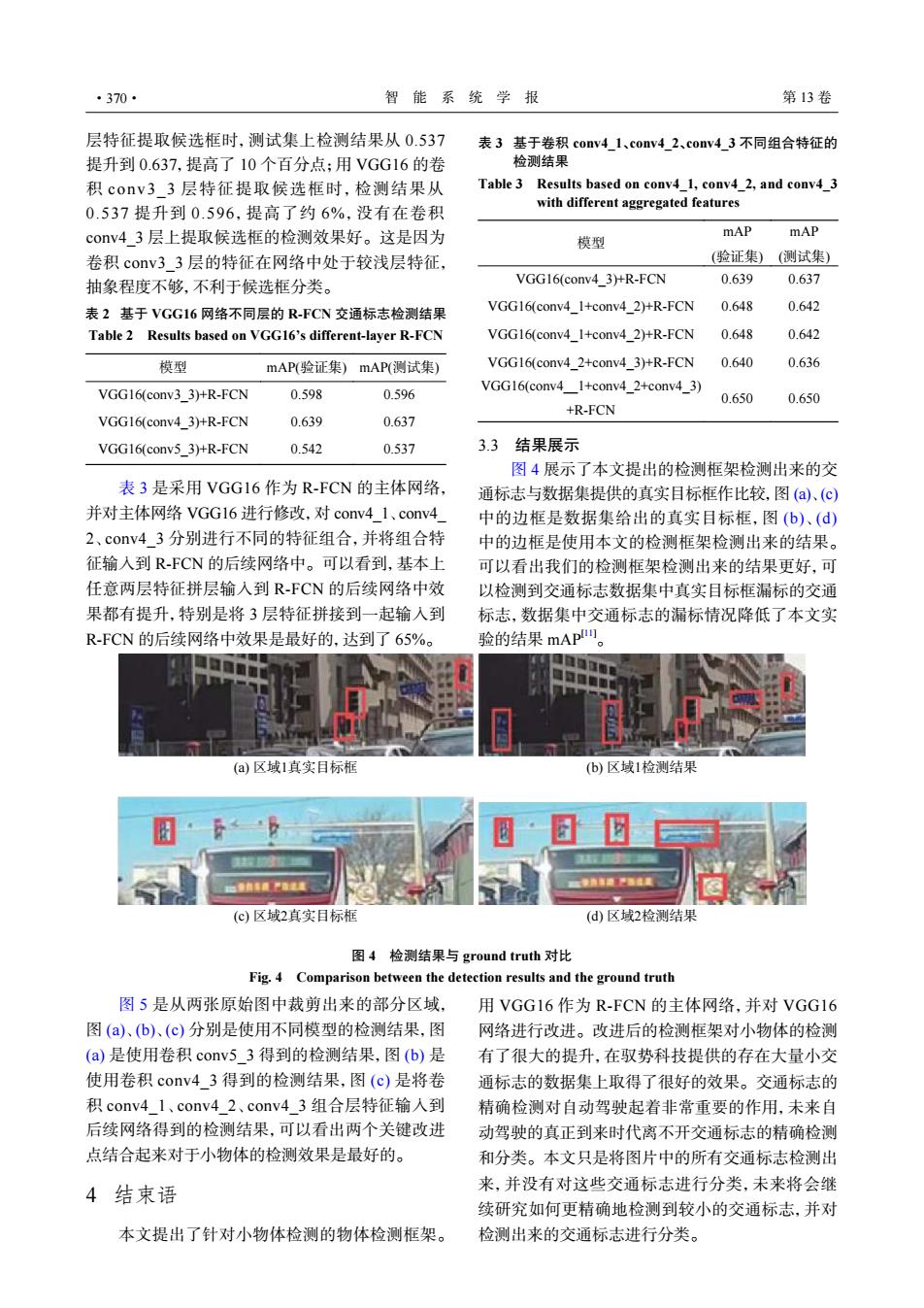
·370· 智能系统学报 第13卷 层特征提取候选框时,测试集上检测结果从0.537 表3基于卷积conv41、conv42、conv43不同组合特征的 提升到0.637,提高了10个百分点;用VGG16的卷 检测结果 积conv3_3层特征提取候选框时,检测结果从 Table 3 Results based on conv4_1,conv4_2,and conv4_3 0.537提升到0.596,提高了约6%,没有在卷积 with different aggregated features conv43层上提取候选框的检测效果好。这是因为 mAP mAP 模型 卷积conv33层的特征在网络中处于较浅层特征, (验证集)(测试集) 抽象程度不够,不利于候选框分类。 VGG16(conv4 3)+R-FCN 0.639 0.637 表2基于VGG16网络不同层的R-FCN交通标志检测结果 VGG16(conv4 1+conv4 2)+R-FCN 0.648 0.642 Table 2 Results based on VGG16's different-layer R-FCN VGG16(conv4 1+conv4 2)+R-FCN 0.648 0.642 模型 mAP(验证集)mAP(测试集) VGG16(conv4_2+conv4_3)+R-FCN 0.640 0.636 VGG16(conv3 3)+R-FCN 0.598 0.596 VGG16(conv4 1+conv4 2+conv4 3) 0.650 0.650 +R-FCN VGG16(conv4_3)+R-FCN 0.639 0.637 VGG16(conv5 3)+R-FCN 0.542 0.537 3.3 结果展示 图4展示了本文提出的检测框架检测出来的交 表3是采用VGG16作为R-FCN的主体网络, 通标志与数据集提供的真实目标框作比较,图(a)、(c) 并对主体网络VGGl6进行修改,对conv41、conv4 中的边框是数据集给出的真实目标框,图(b)、(d) 2、conv43分别进行不同的特征组合,并将组合特 中的边框是使用本文的检测框架检测出来的结果。 征输入到R-FCN的后续网络中。可以看到,基本上 可以看出我们的检测框架检测出来的结果更好,可 任意两层特征拼层输入到R-FCN的后续网络中效 以检测到交通标志数据集中真实目标框漏标的交通 果都有提升,特别是将3层特征拼接到一起输入到 标志,数据集中交通标志的漏标情况降低了本文实 R-FCN的后续网络中效果是最好的,达到了65%。 验的结果mAP。 (a)区域1真实目标框 (b)区域1检测结果 (c)区域2真实目标框 (d)区域2检测结果 图4检测结果与ground truth对比 Fig.4 Comparison between the detection results and the ground truth 图5是从两张原始图中裁剪出来的部分区域, 用VGG16作为R-FCN的主体网络,并对VGG16 图(a)、(b)、(c)分别是使用不同模型的检测结果,图 网络进行改进。改进后的检测框架对小物体的检测 (a)是使用卷积conv5_3得到的检测结果,图(b)是 有了很大的提升,在驭势科技提供的存在大量小交 使用卷积conv43得到的检测结果,图(c)是将卷 通标志的数据集上取得了很好的效果。交通标志的 积conv41、conv42、conv43组合层特征输人到 精确检测对自动驾驶起着非常重要的作用,未来自 后续网络得到的检测结果,可以看出两个关键改进 动驾驶的真正到来时代离不开交通标志的精确检测 点结合起来对于小物体的检测效果是最好的。 和分类。本文只是将图片中的所有交通标志检测出 4结束语 来,并没有对这些交通标志进行分类,未来将会继 续研究如何更精确地检测到较小的交通标志,并对 本文提出了针对小物体检测的物体检测框架。 检测出来的交通标志进行分类。层特征提取候选框时,测试集上检测结果从 0.537 提升到 0.637,提高了 10 个百分点;用 VGG16 的卷 积 conv3_3 层特征提取候选框时,检测结果从 0.537 提升到 0.596,提高了约 6%,没有在卷积 conv4_3 层上提取候选框的检测效果好。这是因为 卷积 conv3_3 层的特征在网络中处于较浅层特征, 抽象程度不够,不利于候选框分类。 表 3 是采用 VGG16 作为 R-FCN 的主体网络, 并对主体网络 VGG16 进行修改,对 conv4_1、conv4_ 2、conv4_3 分别进行不同的特征组合,并将组合特 征输入到 R-FCN 的后续网络中。可以看到,基本上 任意两层特征拼层输入到 R-FCN 的后续网络中效 果都有提升,特别是将 3 层特征拼接到一起输入到 R-FCN 的后续网络中效果是最好的,达到了 65%。 3.3 结果展示 图 4 展示了本文提出的检测框架检测出来的交 通标志与数据集提供的真实目标框作比较,图 (a)、(c) 中的边框是数据集给出的真实目标框,图 (b)、(d) 中的边框是使用本文的检测框架检测出来的结果。 可以看出我们的检测框架检测出来的结果更好,可 以检测到交通标志数据集中真实目标框漏标的交通 标志,数据集中交通标志的漏标情况降低了本文实 验的结果 mAP[11]。 图 5 是从两张原始图中裁剪出来的部分区域, 图 (a)、(b)、(c) 分别是使用不同模型的检测结果,图 (a) 是使用卷积 conv5_3 得到的检测结果,图 (b) 是 使用卷积 conv4_3 得到的检测结果,图 (c) 是将卷 积 conv4_1、conv4_2、conv4_3 组合层特征输入到 后续网络得到的检测结果,可以看出两个关键改进 点结合起来对于小物体的检测效果是最好的。 4 结束语 本文提出了针对小物体检测的物体检测框架。 用 VGG16 作为 R-FCN 的主体网络,并对 VGG16 网络进行改进。改进后的检测框架对小物体的检测 有了很大的提升,在驭势科技提供的存在大量小交 通标志的数据集上取得了很好的效果。交通标志的 精确检测对自动驾驶起着非常重要的作用,未来自 动驾驶的真正到来时代离不开交通标志的精确检测 和分类。本文只是将图片中的所有交通标志检测出 来,并没有对这些交通标志进行分类,未来将会继 续研究如何更精确地检测到较小的交通标志,并对 检测出来的交通标志进行分类。 表 2 基于 VGG16 网络不同层的 R-FCN 交通标志检测结果 Table 2 Results based on VGG16’s different-layer R-FCN 模型 mAP(验证集) mAP(测试集) VGG16(conv3_3)+R-FCN 0.598 0.596 VGG16(conv4_3)+R-FCN 0.639 0.637 VGG16(conv5_3)+R-FCN 0.542 0.537 表 3 基于卷积 conv4_1、conv4_2、conv4_3 不同组合特征的 检测结果 Table 3 Results based on conv4_1, conv4_2, and conv4_3 with different aggregated features 模型 mAP (验证集) mAP (测试集) VGG16(conv4_3)+R-FCN 0.639 0.637 VGG16(conv4_1+conv4_2)+R-FCN 0.648 0.642 VGG16(conv4_1+conv4_2)+R-FCN 0.648 0.642 VGG16(conv4_2+conv4_3)+R-FCN 0.640 0.636 VGG16(conv4__1+conv4_2+conv4_3) +R-FCN 0.650 0.650 (a) 区域1真实目标框 (c) 区域2真实目标框 (b) 区域1检测结果 (d) 区域2检测结果 图 4 检测结果与 ground truth 对比 Fig. 4 Comparison between the detection results and the ground truth ·370· 智 能 系 统 学 报 第 13 卷